

Après un timide démarrage, Ingenuity enchaine les succès sur la planète Mars. Le drone vient d’effectuer son troisième vol, avec un déplacement de plus de 50 mètres cette fois-ci. Comme un enfant avec un nouveau jouet, la NASA prépare déjà le quatrième vol qui devrait avoir lieu dans quelques jours.
Arrivé sur Mars en même temps que le rover Perseverance, le drone Ingenuity s’est retrouvé seul sur la surface de la planète début avril. Depuis, il ne doit donc compter que sur ses propres batteries et panneaux solaires pour son chauffage et ses opérations techniques. Il dépend néanmoins du rover pour envoyer des données à la Terre.
Après un retard à l’allumage suite à une alerte de l’ordinateur de bord (sans gravité) durant les essais, le giravion a finalement fait tourner ses hélices pour la première fois avec quelques jours de retard sur le planning initial. Il a fallu attendre le 19 avril pour que le drone quitte le sol, pendant 39 secondes seulement. Il était alors monté à la verticale sur 3 mètres avant de revenir se poser. C’était la première fois qu’un drone volait sur une autre planète.
Le 22 avril, l’hélicoptère a effectué son deuxième vol sur Mars. Il vient d’enchainer avec un troisième. C’était à chaque fois l’occasion de tester de nouvelles fonctionnalités, d’aller plus loin et plus vite.
51,9 secondes et 5 mètres il y a quelques jours…
Le second essai dans l’atmosphère martienne a duré 51,9 secondes. Le drone est cette fois-ci monté à cinq mètres d’altitude. Dans les deux cas, c’est largement plus que lors du premier essai (39 secondes et 3 mètres respectivement). Il a également effectué des rotations sur lui-même et il s’est un peu incliné afin de se déplacer latéralement (sur deux mètres) avant de revenir à sa position.
La NASA a mis en ligne une vidéo :
Cette fois encore, Perseverance avait des caméras pointées vers le drone afin de capturer en images ce nouvel essai. Le rover était alors à 64,3 mètres d’Ingenuity.
- Mars 2020 (Perseverance) : « sept minutes de terreur », avant de chercher d’éventuelles traces de vie
- Perseverance : des photos de Mars, de la descente, du rover… et une fausse vidéo
Cette nouvelle tentative était quoi qu’il en soit un succès pour les responsables de la mission à la NASA : « Jusqu'à présent, les données techniques de télémétrie que nous avons reçues et analysées nous indiquent que le vol a répondu aux attentes et que notre modélisation informatique antérieure a été précise ». La suite ne s’est donc pas fait attendre.
La NASA a déjà publié trois images prises par la caméra couleur d’Ingenuity durant son second vol (les deux plus récentes se trouvent ci-dessous). D’autres arriveront dans les prochains jours, notamment celles du troisième vol. Visiblement confiante, l’équipe d’Ingenuity avait décidé de « repousser les limites de l’hélicoptère en ajoutant des instructions pour capturer plus de photos ». Elles seront normalement disponibles par ici.
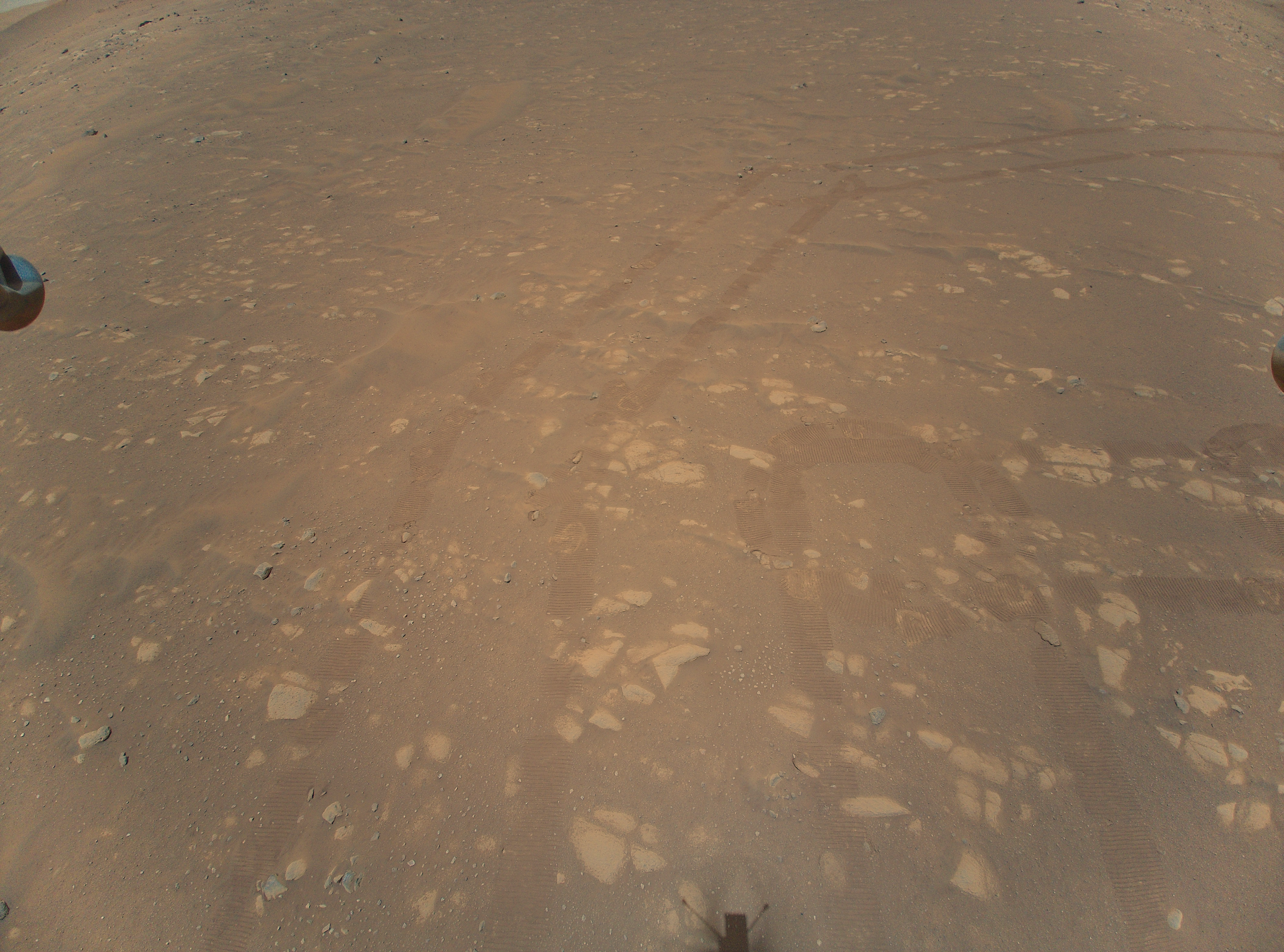

Images capturées durant le deuxième vol. Crédits : NASA/JPL-Caltech
… 80 secondes et déplacement de 50 mètres hier
Le troisième vol d’Ingenuity s’est déroulé il y a quelques heures seulement, et il pourrait se résumer avec une chanson des Daft Punk : Harder Better Faster. Il n’est certes pas monté plus haut que cinq mètres (comme durant le second essai), mais le drone est resté en l’air pendant 80 secondes et s’est déplacé de 50 mètres latéralement à une vitesse de 7,2 km/h… soit plus rapidement que lors de ses essais sur Terre.
Un tel déplacement ne pouvait pas être simulé sur notre planète, explique l’Agence spatiale américaine. Pour se repérer, Ingenuity utilise une caméra noir et blanc – placée sous l’engin – qui capture des images du sol. Elles sont ensuite traitées directement par le drone, qui vole de manière totalement autonome pour rappel. Il y avait un risque : si « Ingenuity vole trop vite, l'algorithme de vol ne peut pas suivre les caractéristiques de surface ».
Là encore, une vidéo capturée par Perseverance a été mise en ligne (on peut voir le drone sortir du champ de vision de la caméra, puis y revenir avant de se poser) :
Ce troisième vol était un baptême du feu pour le drone
« C’était la première fois que nous voyions l’algorithme de la caméra fonctionner sur une longue distance […] Vous ne pouvez pas faire cela à l’intérieur d’une chambre d’essai », explique MiMi Aung, chef de projet hélicoptère au Jet Propulsion Laboratory. En effet, les chambres sous vide du JPL ne permettaient au petit hélicoptère de se déplacer seulement que d’un « demi-mètre dans n’importe quelle direction ».
Ce troisième décollage est donc un aboutissement important du projet pour Dave Lavery, responsable du programme Ingenuity Mars Helicopter à la NASA : « Le vol d'aujourd'hui était ce que nous avions prévu, et pourtant c'était tout simplement incroyable. Avec ce vol, nous démontrons des capacités critiques qui permettront d'ajouter une dimension aérienne aux futures missions sur Mars ».
La NASA prévoit désormais de tenter un quatrième vol dans les jours qui viennent. La mission Ingenuity est prévue pour durer pendant 30 jours martiens ou « sols ». L’Agence spatiale prévoit d’effectuer plusieurs vols de 90 secondes sur quelques centaines de mètres si tout se passe comme prévu.























Commentaires (46)
#1
Le fait de tenter à petits pas est dû au risque de perdre le drone ?
Aucune procédure de retour automatique d’après une balise ?
#1.1
Tout ceci est pour le moment un “Proof of Concept”, ils procèdent donc étape par étape, avec une difficulté croissante pour être sûr que tout fonctionne correctement pour pouvoir valider le concept et peut-être intégrer ce genre de matériel dans de futures missions sur mars (et possiblement sur d’autres corps du système solaire).
Il faut également prendre le temps de recharger la batterie entre chaque vol, le drone ne disposant que de 90s d’autonomie (environ) et doit se recharger avec un petit panneau solaire situé au-dessus des hélices. Ce qui limite fortement les déplacements et les tests.
Normalement, il est prévu un total de 5 vols, les deux suivants inclurons des déplacements plus long et plus rapide et avec d’autres zones d’atterrissage, possiblement choisies automatiquement par l’hélico lui-même avec ses caméras et son système intégré. Et le drone est normalement quasi autonome dans ses déplacements et décisions une fois le programme initial chargé et exécuté par la NASA.
En fonction des résultats des vols qui arrivent, il n’est pas impossible que la mission du drone soit prolongée d’un nombre X de vols (toutefois, il faudra voir avec le temps alloué à la mission et au drone).
#1.3
J’ignorais le problème d’autonomie. Merci pour les précisions !
#1.4
Et il doit aussi maintenir ses composants à une certaine température pour bien fonctionner, car il se gèle les miches là bas (il me semble que c’est le terme scientifique). Le tout alimenté par un panneau solaire pas bien gros, d’où sa faible autonomie et donc des séquences de vol qui seront assez courtes.
N’importe quoi ! Y’a pas de martien, c’est dans le hangar de la Zone 51 où l’alunissage a été mis en scène par Kubrick. Un filtre instagram rougeâtre et l’opinion publique n’y voit que du feu.
#1.6
tout es dit !
Pour la prolongation comme tous les rovers sur mars ont dépassé largement les attentes on a bon espoir de voir Ingenuity voler un ptit bout de temps !
J’aurais bien aimé savoir l’impact des vols sur le panneau solaire, le risque de tous les rovers c’est le sable qui obscurcit le panneau jusqu’à la mort des batteries, est ce que les vols et les pales d’ingenuity nettoient le panneau ?
#1.2
Je pense qu’il n’y a pas de balise, pour 2 raisons :
Ils ont optés pour la navigation par repérage visuel, en cartographiant la zone survolée pour ensuite analyser la trajectoire (un peu comme les aspirateurs robots) donc il y a fort probablement la possibilité d’un retour automatique si les conditions climatiques sont soft.
Pour le moment il semblerait qu’ils testent chaque fonctionnalité séparément, afin de s’assurer de leur bon fonctionnement, avant de les utiliser de manière simultanées. Sur terre on peut aller chercher le drone a pieds, sur mars c’est moins évident
#1.5
Imagine que tu ne sais pas nager. Tu a droit à 1h de cours théorique au sec. Quand on passe à la pratique, sachant que personne ne peut d’aider en cas de problème (comme sur Mars), tu préfères :
#2
Surtout que c’est pas comme si on pouvait le piloter en temps réel en manuel
Rien que le temps d’aller-retour des commandes entre mars et la terre est bien plus long que la durée de la batterie du drone.
C’est forcément des procédures automatiques à mettre en place, donc faut tester chaque procédure avant de la combiner.
#3
Ce qui n’est pas montré, c’est le martien caché derrière le rover et qui pilote le drone
#4
question con: comment ils font pour contrôler la direction?
un moteur qui contrôle l’inclinaison des hélices? un système de poids via les pieds? controle de la différence de vitesse entre les 2 hélices? la réponse D? obiwan kénobi !?
#4.1
Ha, je ne sais plus qui ici avait donner une vidéo montrant comment fonctionne l’appareil, mais en gros, dans le déplacement horizontale, c’est comme une hélicoptère classique avec un “plateau cyclique” :
Si tu veux faire avancer ton hélicoptère, tu dois le faire pencher vers l’avant. Pour ce faire, tu dois augmenter la pousser de ton rotor principale à l’arrière ou la diminuer à l’avant. Il suffit donc d’augmenter l’angle d’incidence des pales lorsqu’elle sont à l’arrière et de le diminuer lorsqu’elle sont à l’avant. Si tes pales sont par pair (sur la même “tige”), ça tombe bien, ça se fait dans la même rotation.
Ce plateau est aussi “passive” : tu peux remarqué sur de nombreux drones qu’il y a une seconde tige avec des petit poids (en anglais c’est une flybar). Cela permet de passivement augmenter la stabilité.
Enfin, la rotation, il ça se joue au niveau de la différence de vitesse de rotation entre les 2 rotors. Il suffit en effet que l’un tourne plus vite que l’autre pour que ça tourne (dans le sens inverse du premier).
Dans le cas présent, pour le rover, il est mû par un moteur nucléaire, donc il est insensible à la poussière.
Cependant, je sais qu’il y a certain rover qui ont une petite pompe à air qu’ils peuvent utiliser entre autre pour se dépoussiérer. Le soucis, c’est qu’il faut arriver à avoir assez d’air dispo pour avoir un peu de pousser, mais aussi qu’il reste assez d’énergie pour le faire. C’est ici le principal problème, plus que la poussière, le froid et quelque chose qu’il faut en permanence combattre sur Mars (et dans l’espace) et si tu n’arrive plus à maintenir tes batteries à une température correcte, tu te retrouve avec des batteries à plat (et pas de booster pour démarrer ton moteur). Il faut donc que le rover puisse faire sa maintenance régulièrement pour ne pas tomber en panne définitive.
Les américains sont par exemple les seul à avoir les technologies et les produits (ça leur coute un bras) pour faire des batterie nucléaire pour des missions spaciales. C’est pourtant bien pratique car en plus de produire pas mal d’électricité, ça produit de la chaleur. Cependant, les missions européenne en sont dépourvu et ainsi ExoMars devra faire sans.
#4.2
Je ne sais pas si c’est utilisé pour Ingenuity, mais comme il a un double rotor, l’orientation du vol peut être réalisée par une variation de vitesse de ces rotors pour utiliser l’effet gyroscopique.
#4.3
Je vois ici en effet je parlais uniquement de la partie “dépoussiérage” des panneaux qui est un vrai problème, le sable est très fin et électrostatique en prime.
Pour le côté “pile nucléaire” non y à pas que les américains ^^ et heureusement, c’est juste qu’on fait pas ce choix pour nos rovers en europe.
https://www.lemonde.fr/archives/article/1975/04/23/mille-stimulateurs-cardiaques-a-pile-nucleaire-ont-ete-implantes-dans-le-monde_2592774_1819218.html
En France on a fait à peu près tout ce qui est possible avec du nucléaire, des piles de pacemaker, des piles pour drones sous marins, des équipements divers, le CEA a une longue liste de projets de ce type et l’industrie (Framatome, Technicatome, …) ont largement les capacités de faire ce type de produit.
Le souci est simple, la NASA est prête a payer à prix d’or des technos à usage quasi unique c’est une forme de crédit impôt recherche, un financement publique de recherche.
En Europe on est plus “frileux” là dessus et les industriels ne cherchent avant tout des débouchés. Donc la pile nucléaire de rover c’est rangé dans la même case que les catapultes électromagnétiques de porte avion, c’est super pointu et y à pas de marché. Donc on en fait pas chez nous ^^ car ça serait purement et simplement trop chère et absolument pas rentable (même scientifiquement)
#4.4
Le problème, c’est le plutonium 238 utilisé dans ces piles : les stocks sont faible, la Russie n’en produit plus du tout et les USA dépense des sommes astronomiques pour relancer une petite production.
Les pacemaker au pu-238 ont bien existait, mais principalement dans les année 60-70 et s’est arrêté dans le milieux des années 80. L’article du Monde que tu as mis en lien date justement de cette époque : Publié le 23 avril 1975.
#5
C’est tout de même assez incroyable tout cela. Le ping entre terre et mars est de combien de
secondesminutes ?#6
Il fonctionne comme une hélicoptère, donc en jouant sur l’inclinaison du rotor et/ou des pales.
#7
Si je dis pas de bêtise il est de 7 minutes en ce moment. Et ça augmente ou baisse en fonction des positions de la Terre et Mars.
#7.1
Merci :)
#7.2
Si ce site (https://theskylive.com/how-far-is-mars) est exact, alors le ping serait de 16 minutes et 30 secondes, soit un round-trip de 33 minutes…
#7.3
A priori en ce moment c’est plus 17 minutes lumière entre la terre et mars, donc 34 minutes de ping. (source : https://www.wolframalpha.com/input/?i=distance+to+mars )
Edit : grillé !
#7.4
Ah merci d’avoir corrigé 😊 Je sais pas d’où j’ai sorti mes 7 minutes 😃
#7.5
Peut-être de ça ? Mars 2020 (Perseverance) : « sept minutes de terreur », avant de chercher d’éventuelles traces de vie
#7.7
Oui ça doit venir de cet article ☺️
#7.6
Le temps varie entre 6 minutes et 22 minutes environ à multiplier par deux en fonctions des positions de la Terre et de Mars, ainsi que des obstacles sur le passage.
#7.8
ça peut aller jusqu’à 20 mn. de “Latence” !
#8
J’espère qu’avant la fin des tests d’ingenuity, ils pourront faire une photo du rover depuis le drone.
Ça serait très surprenant que la NASA prenne le risque de se rapprocher du rover en vol, mais même à 64m on doit pouvoir avoir un bout de terrain avec Perseverance au milieu.
#8.1
C’est fait :).
#9
Il me semble avoir vu que les chinois sont en train de développer aussi leurs propres RTG. Mais effectivement ça coûte plus qu’un bras, le MMRTG qui équipe Perseverance coûterait dans les 109 millions de dollars.
#10
Oui et non, si effectivement on se gèle les miches sur mars ( -63°C) la pression est tellement faible 1000Pa ( à comparer au 100.000 Pa sur terre) que les pertes thermiques doivent rester relativement faible. Sur terre l’atmosphère martien serait considéré plutôt comme une bonne isolant.
#10.1
Merci pour ce complément.
#10.2
C’est la différence de pression entre l’intérieur du rover et l’extérieur de la coque qui pose problème.
Je suppose que les composants sont en légère dépression au départ de la terre pour éviter de trop user la coque à l’arrivée et garder un peu de pression pour éteindre un éventuel incendie sans faire rentrer du co2 dans le rover mais en sortant le comburant transporté très vite.
Le chauffage par pile nucléaire permet ce genre de largesses bien pratiques…
#11
En tout cas, chapeau JPL !
#12
C’est n’imp ton histoire:

“rentrer du CO²” c’est justement la technique utilisée dans les data-centers pour éteindre un incendie.
Ensuite, pourquoi vouloir faire des systèmes étanches?
garder une pression constante entre la Terre, l’espace et Mars, c’est juste aberrant à 1ère vue, non?
Je passe le reste, incompréhensible, …


#12.1
Je n’ai pas vu beaucoup de datacenters sur Mars.
Je ne faisais qu’une hypothèse sur la remarque thermique de Alxnd pour montrer que la pression peut servir à plus évident !
Le coût d’un système d’extinction du feu à part me parrait ainsi élevé d’autant que son poids… Autant donc aller au plus évident quand on peut chauffer les composants rapidement et efficacement avec une résistance et profiter de basses pressions.
Si ce n’est pas clair argumente… ou sors moi leur méthode standard (NASA) pour résoudre ce problème de gel !
#13
Pour limiter le risque d’incendie le mieux est de remplir directement le drone de CO2 directement depuis la terre.
Je doute que le drone soit équipé d’une pile nucléaire vue les contrainte de poids.
Après en regardant le descriptif du projet sur wikipedia, la consommation d’électricité pour chauffer le drone la nuit, 20 watts-heures, soit globalement la puissance dégager par une résistance de 20 ohme alimenter en 3,6V pendant 10 heure, reste relativement importante par rapport à la capacité total de la batterie, 30 watts-heures.
#14
Meh on a bien mieux que le CO2…
C’est une petite pile au dioxyde de plutonium pour le rover. Pour le drone c’est une batterie en effet.
Oui mais les isolants minces (lames d’air) retenant de l’air ou d’autres gaz l’équilibrage de pression éclaterait la coque si ils étaient efficaces.
Ta remarque sur l’isolation de l’air martien est à vérifier… vu les enmmerdes sur terre je pense que la NASA se fiche “un peu” du problème. Ils chauffent quoi.
#15
(j’ai une question)
#15.1
Le drone n’utilise pas d’oxygène a priori.
Je disais qu’en plus du CO2 comme on me l’a fait remarqué il y a certainement d’autres mélanges de gaz inerte (donc non comburant) que l’air terrestre pour isoler si besoin (là c’est pas le cas je pense du coup) et prévenir les incendies.
Du moment que le milieu où se développe le chaud permet de chauffer les composants et de casser l’oxydoréduction de l’incendie si il y en a un c’est bon.
Je disais donc que c’est peut-être la sur pression du drone qui permet d’éviter d’une part les fuites d’atmosphère martienne (donc avec du méthane !!) à l’intérieur (encrassement) et un mélange terrestre chargé ou pas (thermiquement peu isolant du coup et c’est le but!) qui permet de contrôler le besoin de chauffe.
Là dessus j’ai pas d’info pour évaluer si leur mélange joue ou non un rôle de caloriporteur…
Par contre sur le principe des dissipateurs thermiques on peut supposer qu’à l’intérieur du drone on a un échangeur passif qui permet aux cellulles de batterie de s’autoréchauffer plus rapidement et ce indépendament du milieu dans lequel elle est srockée. ;-)
#16
L’atmosphère martienne est tellement faible et la proposition de méthane tellement insignifiante (10ppb) qu’une réaction avec le méthane présent dans l’atmosphère martienne, si elle à lieux, aura une cinétique extrêmement faible. Il n’y a donc, à priori, peux de risque en cas de contamination de l’intérieur du drone par l’atmosphère martienne.
Par comparaison l’activité du méthane présent dans l’atmosphère est supérieure de plusieurs ordre de grandeur a l’activité du méthane présent dans l’atmosphère martienne. Sans que nos ordinateurs s’enflamment spontanément…
Ah… et puis le méthane est un carburant pas un Comburant donc sans oxygène pas de combustion…
#16.1
Oui enfin tout dépend de ce que tu entends être contaminé. Ce n’est pas le même problème si tu as du méthade dans un PC ou dans un MEMS ou instrument de mesure à 10K dont le prix du billet aller simple pour mars te coûte 100x plus… combien d’échecs d’instruments faudra-t-il…
Ensuite tu as des comburants partout. Inutile de spécialement se focaliser sur l’oxygène les composants sont-eux mêmes inflamables…
Mon point est de réagir au problème d’équilibrage des pressions entre la terre et mars qui joue nécessairement sur le choix des remplissages des nombreuses parties étanches et potentiellement inflamables du rover et du drone.
Si en plus le caractère thermique joue il faut choisir un gaz non comburant, ne réagissant pas avec des composants sous pression et si possible isolant à faible pression (ce qui renvoit à la différence de pression qui idéalement devrait être en surpression si on pense incendie, mais en sous pression si on pense isolation).
#17
Les composants servent de carburant, pas de comburant. Quand un composant flambe, le comburant est toujours l’oxygène.
Un gaz neutre, quoi
#17.1
Révise l’oxydoreduction… tu n’as pas que l’oxygène qui oxyde !
Un gaz noble.
#18
Dans les oxydoréducteurs il y a principalement l’oxygène et ses dérivés et le chlore, ce qui ne change absolument rien vu que les composants ne sont dans tous les cas pas des comburants.
#19
Je me demande comment tu fais pour produire de l’oxygène avec MOXIE alors…
Et comment tu empêches le lithium de tes batteries de réagir avec la vapeur d’eau que tu laisses dans tes boitiers soit disant sous vide et à pression marsienne…
Si j’avais le budget de la NASA ces détails techniques me feraient considérer les flammes à basse température et les réactions d’oxydoréduction comme problématiques… surtout si en plus je fais possiblement des étincelles avec un peu de tension.
Bref : penser que ce serait négligeable c’est aussi ne pas avoir de normes sur terre. C’est embêtant…
#20
je t ‘invite à aller lire les définitions de comburant et de combustible… Ca devrait répondre à pas mal de tes questions existentielles que tu poses ici.
#20.1
Humphry Davy lui-même avait compris ce que tu dénigres avant ta naissance.
Ta réponse c’est du foutage de gueule.