

Depuis plusieurs décennies, des fabricants travaillent sur les pseudo-satellites à haute altitude (alias HAPS). Alors que l'Agence spatiale européenne envisage sérieusement leur exploitation, nous avons décidé de revenir sur ces engins exploitant les dernières avancées technologiques.
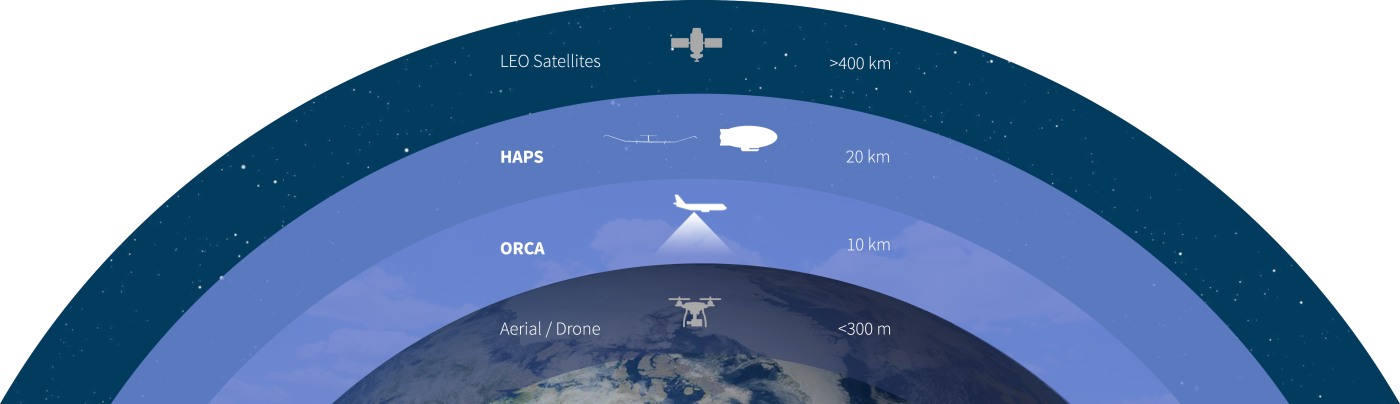
Dans le ciel (et l'espace), les satellites volent à une altitude de plusieurs centaines de kilomètres, voire des milliers pour les plus éloignés. Plus proches de nous, les avions et quelques drones expérimentaux, comme les ballons stratosphériques du projet Loon de Google (dont le CNES est partenaire) et le drone Aquila de Facebook, évoluent à quelques kilomètres.
Mais les choses pourraient rapidement évoluer puisque l'Agence spatiale européenne (ESA) s'intéresse de près à cette région du ciel, et elle n'est pas la seule. Dans son dernier communiqué de presse, elle explique qu'elle « envisage d'étendre ses activités via un nouveau type de véhicule aérien, un "chaînon manquant" entre les drones et les satellites ». Il s'agit des HAPS, pour pseudo-satellites à haute altitude (ou High Altitude Pseudo-Satellite).
Des engins volants ou « flottants » entre 20 et 50 km d'altitude
Les HAPS sont des plateformes volantes ou « flottantes » (comme les ballons stratosphériques) évoluant à une altitude du même ordre de grandeur que celle des avions de ligne, mais avec un mode de fonctionnement proche de celui des satellites.
Comme les satellites géostationnaires (à 36 000 km d'altitude) ils peuvent rester au-dessus d'une zone ciblée pendant plusieurs mois, voire des années. Les HAPS se placent entre 20 km et 50 km d'altitude, au-dessus des jet-streams et des avions de ligne qui volent généralement à moins de 40 000 pieds, soit environ 12 km.
L'idée n'est pas nouvelle, mais elle prend de l'ampleur à l'ESA
Ce n'est pas la première fois que l'ESA s'intéresse aux HAPS, loin de là. Un atelier intitulé « vers un programme de satellites pseudo-satellites stratosphériques de haute altitude (HAPS) de l'ESA pour l'observation de la Terre, les télécommunications et la navigation » était par exemple organisé début octobre.
Depuis début novembre, et jusqu'au 24 janvier 2018, un programme d'études de faisabilité a été mis en place avec jusqu'à 200 000 euros de financement pour une durée maximum de neuf mois en fonction des projets. Le but est « d'identifier et analyser des applications et des services techniquement et économiquement viables s'appuyant sur des stations HAPS ».
Rappelons enfin que ce concept ne date pas d'hier : de nombreuses initiatives ont été lancées depuis les années 90 indique l'Agence spatiale européenne. Néanmoins la phase d'exploitation approcherait à grands pas et « les premiers services opérationnels pourraient être attendus d'ici 2018-2022 ».
« Nous étudions le concept depuis 20 ans, mais maintenant cela devient réalité » explique le scientifique de l'ESA Thorsten Fehr. Plusieurs avancées technologiques permettent, selon lui, de l'affirmer : la miniaturisation de l'avionique et des capteurs ainsi que des cellules solaires et des batteries toujours plus performantes.
Des avantages nombreux, notamment sur les coûts et la latence
Comparés aux satellites géostationnaires, les HAPS disposent évidemment d'un champ de vision bien plus restreint, avec un rayon d'environ 500 km. C'est tout de même suffisant pour mettre en place des services de surveillance de la Terre, de communication haut débit et de navigation par pseudo-satellites (dans l'idée du GPS et de Galileo). Avec une altitude plus basse, ils ouvrent par contre la voie à des images avec une définition plus élevée, tout en réduisant les angles morts et la latence des communications.
Il est en effet bien plus rapide de parcourir un aller-retour entre un HAPS et la Terre (2x 20~50 km) qu'avec un satellite géostationnaire (2x 36 000 km). Dans le premier cas la lumière (en prenant comme valeur environ 300 000 km/s) mettrait 0,33 milliseconde maximum pour un aller-retour, contre 240 millisecondes pour le second, soit un rapport de 1 à 720.
La 5G pourrait ainsi passer par les pseudo-satellites à haute altitude, notamment lorsque la latence sera un élément important.
En plus de Loon (Google), il existe déjà plusieurs projets
Les HAPS sont déjà parmi nous depuis des années. L'exemple le plus parlant est sans aucun doute le projet Loon de Google. Le géant du Net a d'ailleurs déjà prouvé leur efficacité en les déployant au-dessus de Porto Rico afin d'apporter une connexion de base à cette île dévastée par l'ouragan Maria. Selon Google, les ballons sont utilisés par plus de 100 000 personnes.
Le projet Aquila de Facebook a mené à bien son second vol de test (après un atterrissage chaotique au premier essai), mais rien de bien concret à se mettre sous la dent depuis. Le réseau social n'est pour autant pas resté muet et tente aussi d'occuper le terrain face à Loon.
« Nous avons précédemment parlé des deux premiers vols d'essai de nos drones solaires HAPS et de notre travail de développement de nouveaux systèmes de communication, mais le programme Aquila va bien au-delà de ces deux aspects ». Il veut être un système complet et commercialement viable explique le réseau social dans un billet de blog mis en ligne le mois dernier... quelques jours seulement après l'annonce de Google concernant Porto Rico.
De l'aile volante Zephyr d'Airbus, à l'imposant dirigeable Stratobus de Thales
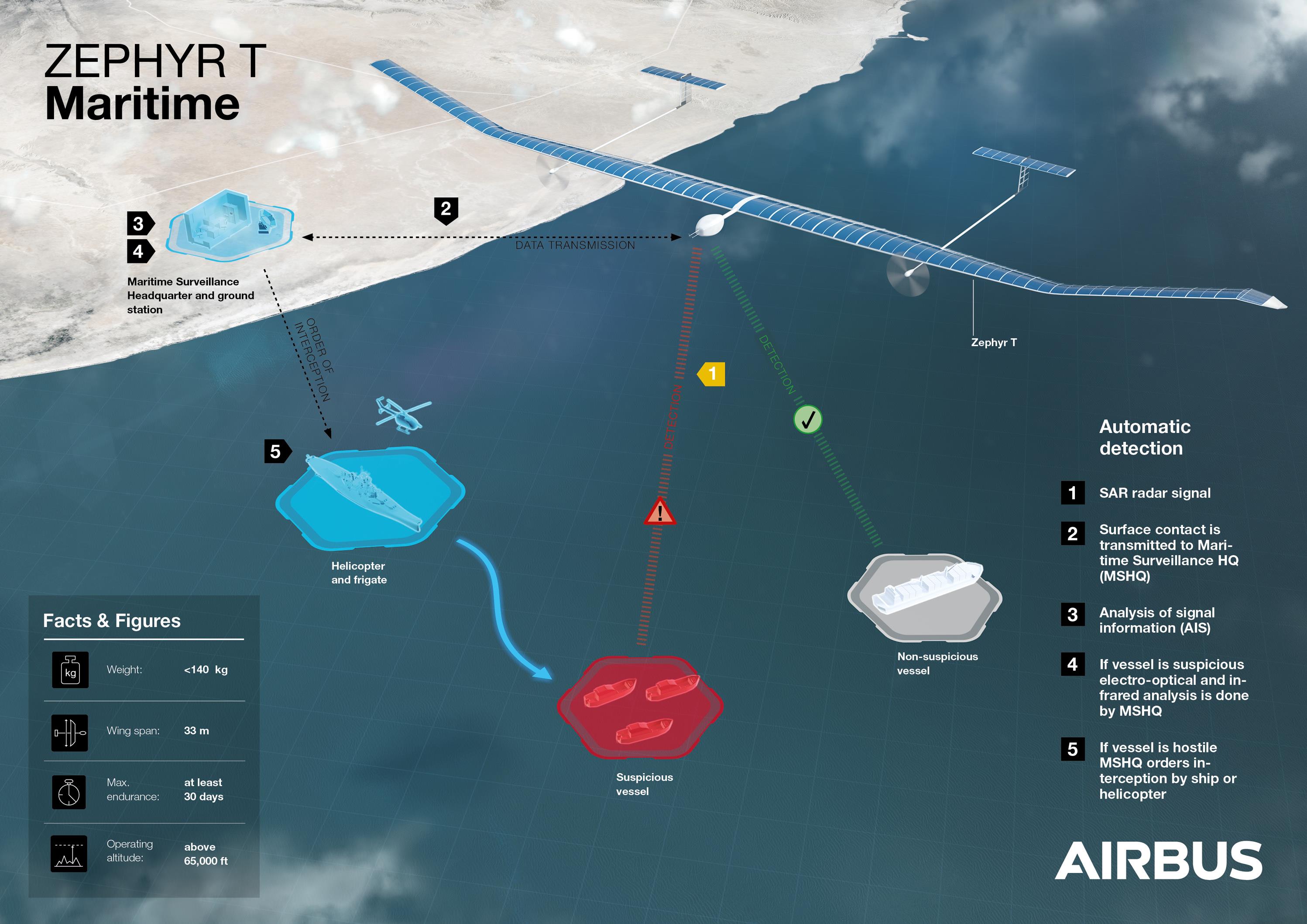
De son côté, Airbus travaille depuis plusieurs années sur ses Zephyr S et T, deux HAPS entièrement alimentés par des panneaux solaires posés sur leurs ailes. L'envergure du premier est de 25 mètres, contre 33 mètres pour le second pour un poids de 62 kg et 140 kg seulement. La charge utile est par contre très limitée avec 5 et 20 kg respectivement, pour une autonomie de quelques semaines. Le Zephyr avait établi un record du monde en 2010 en volant pendant 14 jours sans aucun ravitaillement.
Thales n'est pas en reste avec son Stratobus, un projet démarré en avril 2016 avec un financement de 17 millions d'euros alloué par le Commissariat général à l'investissement. Le stratobus prendra la forme d'un ballon volant à une altitude de 20 km. Il sera équipé de deux moteurs électriques afin de se maintenir en place.
Nous changeons par contre complètement d'échelle par rapport aux Zephyr avec un engin de près de 7 tonnes, de 115 mètres de long et de 34 mètres de large au maximum. La charge utile standard sera de 250 kg avec une puissance de 5 kW et des versions avec davantage de capacité sont également évoquées. La durée de la mission est de 5 ans, avec une maintenance annuelle. Bref, s'il s'agit d'un HAPS comme Loon et Zephyr, mais ils ne jouent pas dans la même catégorie.
Les possibilités sont nombreuses selon le fabricant : « Le Stratobus embarquera des missions de type surveillance des frontières, de sites critiques sur terre comme sur mer (vidéo protection des plates-formes off-shore), de la sécurité militaire (lutte contre le terrorisme, les trafics de stupéfiants), mais aussi de contrôle environnemental (feux de forêt, érosion des plages, pollutions …) et télécommunications (internet, 5G) ».
L'année prochaine la CDR (Critical Design Review) devrait fournir un concept détaillé permettant de lancer la phase de fabrication du Stratobus. Le premier vol du prototype est ensuite prévu pour 2020/2021, avec une production à l'horizon 2020/2022 selon Jean-Philippe Chessel, directeur de la ligne de produits Stratobus chez Thales Alenia Space.



Il faut prévoir une harmonisation mondiale
Les idées et les prototypes ne manquent donc pas, mais il reste encore des barrières réglementaires à franchir. Dans son plan stratégique publié fin 2016, l'ANFR s'était également penché sur la question. L'Agence des fréquences était arrivée à la conclusion que « les développements récents nécessitent désormais que les agences du spectre du monde entier se positionnent, dans le cadre des travaux de l’UIT, sur les besoins en spectre associés à ces nouveaux services ».
Elle souhaite également déterminer si les bandes de fréquences déjà identifiées seront suffisantes pour répondre aux besoins, ou s'il faut en débloquer de nouvelles. L'utilisation du spectre préoccupe également Airbus et Facebook, les deux protagonistes ayant annoncé un accord de collaboration il y a quelques jours. Ils encouragent l'Union internationale des télécommunications (UIT) à plancher sur cette question lors de la prochaine Conférence mondiale des radiocommunications en novembre 2019 (la dernière date de 2015).
L'ANFR se demande également si l'actuelle définition juridique internationale (vieille de plusieurs années) des HAPS est toujours judicieuse. Elle est la suivante : « une station installée sur un objet placé à une altitude comprise entre 20 et 50 km et en un point spécifié, nominal, fixe par rapport à la Terre ».
Des idées plein la tête qu'il faut maintenant concrétiser.






















Commentaires (34)
#1
Intéressant !
 " />
" />
J’espère qu’ils ont prévu également la récupération, quand ça tombe en fin de vie, parce que se prendre un ballon ou un drone sur le coin de la figure ne serait pas forcément une bonne chose.
#2
“La durée de la mission est de 5 ans, avec une maintenance annuelle.”
Je suis curieux de connaître les solutions techniques pour la maintenance en vol.
#3
Ca donne quoi au sol dans une grande ville un truc de 7 tonnes qui tombe depuis une altitude de 20km ?
#4
Dans le cas d’un HAPS, tu peux prévoir une maintenance en vol.
C’est un gros dirigeable :)
#5
J’aurais bien dit les réacteurs dans le dos des « jetmen » http://www.jetman.com/), mais j’ai le sentiment, je ne sais trop pourquoi, que ce ne sera pas retenu " />
" />
#6
#7
On ne s’est pas arrêté à ces considérations pour faire voler des trucs de 120 t à 11 km.
#8
#9
C’est moins badass que d’imaginer des mecs sauter en parachute dessus avec des boîtes à outils.
#10
Allo les mecs au sol, planquez vous je viens de lacher mon tournevis
#11
Si tout à fait.
 " />
" />
 " />
" />
Mais alors se pose la question de la continuité de service et du coup d’annoncer 5 ans d’autonomies. Parce que ça fait plutôt 1 an d’autonomie avec remplacement rapide.
Je suis client, je veux du 100%, avec deux semaine de maintenance au sol par an, on passe à 96 % d’uptime en étant généreux, c’est pas terrible. D’où ma conclusion : c’est forcément fait en vol.
Ou alors ils envoient un truc temporaire mais là les coûts et la logistique serait aussi très important et ça ne me parait pas tip top non plus.
Mais j’y connais pas grand chose, tout comme en aérodynamique, d’où, encore une fois, ma curiosité
Les gars de l’ESA, si vous passez par là, ça nous intéresse !
Si quelqu’un à trouver l’info sur leurs site, ça m’intéresse. On dirait pas comme ça, mais je bosse là…
#12
pour un engin autonome, les pilotes automatiques ont montré leurs performances depuis longtemps et régulièrement à bord des avions, mais les seuls moments où le pilote est vraiment nécessaire, c’est au décollage et à l’atterrissage. J’ignore l’état de la technique sur les atterrissages autonomes, mais ça me semble quelque chose de complexe, par rapport à juste « continuer à voler »
#13
https://www.youtube.com/watch?v=TQE2sJWCHsQ
 " />
" />
Pour les fans de la 7ème compagnie
#14
Cool si ça se généralise on aura peut-être des ballons dans KSP :)
#15
#16
Rien empêche que plusieurs “modules” couvrent la même surface surtout qu’il n’est pas forcément question de pointer pour capter le signal.
#17
Il me semble que les amerrissages se font en pilote automatique. Par contre c’est la phase de décollage qui reste délicate !
#18
C’pas idiot, s’il y a une redondance complète, on peut tout à fait imaginer que le risque soit pris de réduire temporairement une redondance localisée pour la maintenance. C’est vrais que j’imaginais juste un ballon pour la France (par exemple, 500 km de rayon d’action donc 1000 km de diamètre ça doit passer) et basta. Mais il faudrait sûrement une redondance à 2 voir 3 ballons et là c’est bon.
#19
ah bien vu, j’avais pensé terre systématiquement, en pensant aux zones survolées , sans prendre en compte que les 3⁄4 de la planète sont de l’eau. " />
" />
#20
 " /> les atterrissages pardon
" /> les atterrissages pardon
#21
quiproquo " />
" />
Ceci dit, les fusées américaines étaient récupérées dans l’océan : quand ça tombe, il n’y a pas grand-monde en-dessous, et ils ont une flotte importante, ça aide à retrouver facilement, et sans trop de dommages, les capsules.
#22
#23
https://www.koreus.com/video/autoland-boeing-brouillard.html
Je me rappelais avoir vu cette vidéo, ça m’avait interpelé et du coup je m’étais un peu interrogé sur le pilote automatique des avions.
#24
Ouaip, même si on divise la France en 4, l’idée c’est quand même qu’il faudrait de toutes façons 2-3 ballons par zone pour assurer un uptime de 100% à mon avis indispensable pour concurrencer le satellite. L’idée reste la même : c’est bon.
Et sinon, je crois bien qu’on garde des pilotes dans les avions pour les situations extrêmes et l’aspect psychologique mais qu’on en a plus vraiment besoin depuis un moment. Comme là on se débarrasse des situations extrêmes en choisissant à peu près quand atterrir et qu’il n’y a pas d’être humain dedans, à mon avis, full auto ça le fait pour toutes les phases. Bourane en son temps le faisait très bien.
#25
Pause obligatoire au boulot => J’ai fait une petite recherche et voici la réponse à la question :
Il peut donc assurer des missions de 5 ans, avec une maintenance annuelle au sol de quelques jours. Pendant les phases de maintenance, un Stratobus de rechange permettra d’assurer la continuité de la mission de telle sorte qu’elle soit ininterrompue pendant 5 ans.J’ai trouvé ça là. La source est donc très fiable.
#26
#27
#28
Je ne me mettais pas à la place du client Edrae particulier avec sa petite connexion Internet moisie mais à la place de SFR/Orange/Sky/OVH/… qui voudrait utiliser ces services. Et là, l’uptime est autrement plus important.
Pour le reste, je t’invite à lire mon message précédant. Il y a la réponse à la question par le responsable du programme : atterrissage quelques jours et remplacement par un autre. Cette solution me semblait compliquée et coûteuse mais apparemment c’est jouable.
Quand à savoir pour quoi ce sera utilisé, peut-être pour filer Internet aux refuges de montagnes mais pas seulement.
#29
Ou ils y vont en dirigeable aussi. " />
" />
#30
#31
#32
#33
#34