

L'accident mortel avec une voiture autonome Uber pourrait presque être un tragique cas d'école. Elle avait détecté le piéton, mais sans parvenir à le classer correctement car il n'était pas sur un passage clouté. Si un pilote automatique n'est pas capable de gérer une situation en dehors des clous du Code de la route, on n'est pas sorti de l'auberge.
Mardi 19 novembre, le National Transportation Safety Board (NTSB) réunira son Conseil afin de déterminer la cause probable de l'accident mortel impliquant une voiture autonome Uber – une Volvo XC90 2017 modifiée – en mars 2018. La réunion sera retransmise en direct sur cette page.
En amont, 43 documents pour un total de 439 pages ont été mis en ligne par le NTSB, permettant d'avoir de nouveaux éclairages sur cette sombre histoire. Dans le lot, on trouve notamment le « Vehicle Automation Report » donnant de nombreux détails sur le fonctionnement de la voiture autonome dans les secondes précédant l'impact.
Le régulateur y décrit chronologiquement l'ensemble des détections et actions des capteurs et du pilote automatique, permettant de mieux comprendre pourquoi le système n'a pas réagi plus tôt. Mais surtout ce rapport met en lumière un des gros problèmes des intelligences artificielles/pilotes automatiques : la faculté d'anticiper et de réagir face à un événement hors scénario. Dans le cas présent, un simple piéton en dehors d'un passage clouté.
Une première détection 6 secondes avant l'impact
Pour rappel, l'accrochage impliquait un piéton traversant la route avec son vélo (des photos du lieu sont disponibles par ici). Elaine Herzberg, âgée de 49 ans, est décédée des suites de cet accident. Le conducteur de test présent dans la voiture n'a souffert pour sa part d'aucune blessure physique. Il n'avait par contre quasiment pas réagi avant le choc.

Un rapport préliminaire avait été mis en ligne en mai 2018, deux mois après l'accident. On y apprenait que les radar et lidar avaient détecté le piéton environ 6 secondes avant l'impact, sans pouvoir l'identifier.
De son côté, « le conducteur du véhicule a pris le volant moins d'une seconde avant l'impact et a commencé à freiner moins d'une seconde après », pas suffisant pour éviter le drame. Problème, selon des éléments de l'enquête le conducteur de la Volvo était en train de regarder une vidéo sur son smartphone au moment de l'accident, ce qui expliquerait le délai de réaction beaucoup trop long.
Lidar, radar et caméra : trois « yeux » sur la route
Dans son nouveau rapport, le NTSB rappelle s'il en était besoin que l'Aide à la conduite automobile (ADAS) de Volvo était désactivée pour ne pas interférer avec le pilote automatique d'Uber. Les capteurs de la voiture modifiée par Uber avaient été calibrés une semaine plus tôt.
Avant d'entrer dans les détails, le National Transportation Safety Board pointe un élément important pour la suite : le fonctionnement de la détection d'objet sur et autour de la route. Cette fonction « est principalement effectuée par les systèmes lidars, radars et caméras, qui ont chacun des fonctions spécialisées différentes. Lorsqu'un objet est détecté, il est suivi, son cap et sa vitesse sont calculés. Ils sont classés par le système en tant que véhicules, piétons ou cyclistes, mais un objet peut aussi être classé dans la catégorie "autre" ».
Des algorithmes internes se chargent de mélanger les différentes sources d'informations pour arriver à la bonne conclusion. Une fois un objet détecté, le système tente de prédire sa direction et sa vitesse. Par exemple, un véhicule sur une voie de circulation sera généralement considéré comme roulant dans le sens de circulation de cette voie. L'historique des détections d'un objet permet d'affiner les prédictions, continuellement mises à jour en fonction des informations reçues.
Catégorisation et calcul de trajectoire des objets détectés
On touche au problème lorsqu'un objet change de catégorie : son historique n'est plus pris en compte pour le calcul des trajectoires possibles. Pour en ajouter une couche, les objets classés dans « autres » sont considérés comme n'ayant pas d'objectif particulier. Pour ces objets, « leur emplacement actuellement détecté est généralement considéré comme un emplacement statique, à moins que cet emplacement ne se trouve directement sur le trajet du véhicule automatisé, cet objet n'est pas considéré comme un obstacle possible ». Sans être expert on voit vite arriver les problèmes potentiels...
Le NTSB en profite pour expliquer qu'il en est de même pour les piétons se trouvant en dehors d’un passage clouté : ils n'ont pas d'objectif selon le système. Mais il peut toujours prédire une trajectoire basée sur les vitesses observées, lorsque l'objet est continuellement détecté en tant que piéton. S'il existe un risque de collision, des mesures sont prises.
Seconde par seconde, le déroulement de l'accident
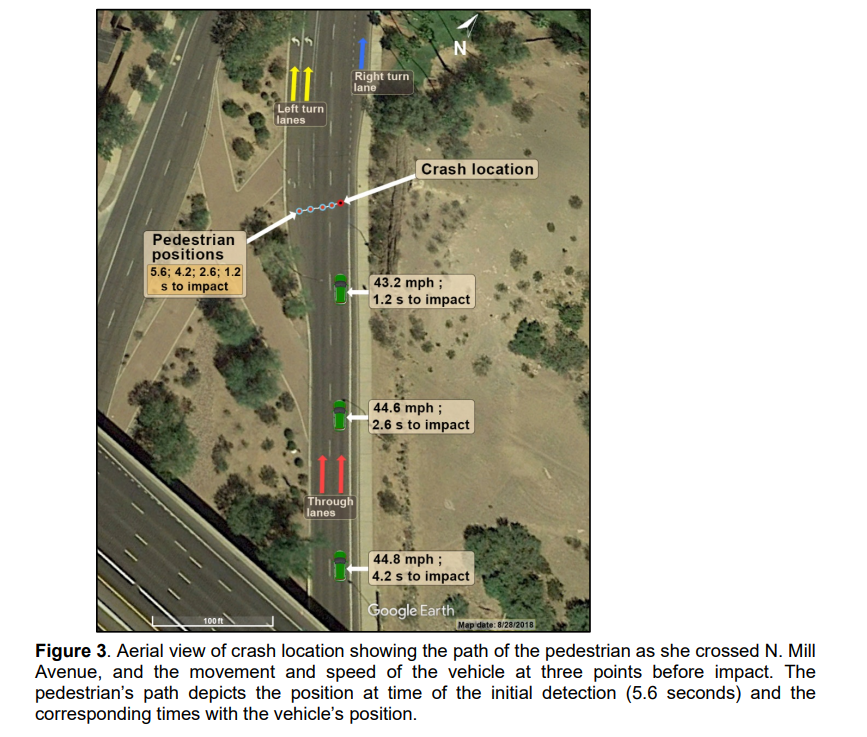
Dans le cas de l'accident de Tempe (Arizona) en mars 2018, le NTSB retrace très précisément les événements :
- 9,9 secondes avant impact : le véhicule commence à accélérer (il était à 56 km/h).
- 5,8 secondes avant impact : le véhicule atteint la vitesse de 71 km/h environ, dans le respect de la limitation.
- 5,6 secondes avant impact : le radar fait une première détection et classe le piéton comme véhicule, sans identifier qu'il croise la trajectoire de la voiture.
- 5,2 secondes avant impact : le lidar détecte aussi le piéton et le classe dans la catégorie « autre », en estimant qu'il est statique. La vitesse de la voiture est maintenant de 72 km/h.
- 4,2 secondes avant impact : le lidar classe le piéton comme véhicule, sans garder l'historique des précédentes détections puisqu'il change de catégorie. Le pilote automatique le considère toujours comme statique.
- 3,9 secondes avant impact : le lidar maintient sa version d'un véhicule. Le système calcule sa trajectoire supposée et estime que l'objet se déplace sur la voie de gauche, à côté de la voiture, sans risquer de croiser son chemin.
- 3,8 à 2,7 secondes avant impact : le système alterne plusieurs fois entre véhicule et autre pour classer le piéton, perdant l'historique à chaque fois. Le piéton est considéré comme statique ou en déplacement sur la voie de gauche.
- 2,6 secondes avant impact : le lidar détecte le piéton comme un vélo, de nouveau sans avoir d'historique. La prédiction est alors qu'il s'agit d'un objet statique, qui ne croise pas la route de la voiture.
- 2,5 secondes avant impact : le lidar maintient sa version d'un vélo et le système dispose désormais d'un court historique pour estimer son déplacement. Il serait sur la voie de gauche et ne croiserait pas la route du SUV.
- 1,5 seconde avant impact : le lidar change de nouveau sa version et classe le malheureux piéton dans « autre », sans historique ni objectif, le système considère l'objet comme statique et partiellement sur le chemin de la voiture. Une manœuvre d’évitement par la droite semble alors suffisante. La vitesse est de 71 km/h.
- 1,2 seconde avant impact : le lidar revient à sa version d'un vélo. On perd de nouveau l'historique et le système estime cette fois-ci qu'il est sur le chemin du SUV. La vitesse est de 69 km/h. Le plan d'évitement défini 300 ms auparavant n'est plus d'actualité, car dangereux ; « la suppression de l'action commence ».
- 0,2 seconde avant impact : la suppression est terminée (une seconde tout de même). La situation est toujours considérée comme dangereuse, le système baisse la vitesse (64 km/h) et envoie une alerte sonore.
- 0,02 seconde avant impact : le conducteur donne un coup de volant, désengageant le pilote automatique. La vitesse est de 63 km/h.
- Impact mortel.
- 0,7 seconde après impact : le conducteur appuie sur les freins.
Un piéton en dehors d'un passage clouté ? Ça n'existe pas voyons
La première détection a donc eu lieu moins de 6 secondes avant l'accident, un délai en théorie largement suffisant pour anticiper et éviter le drame. Problème, « le système n'a jamais classé [Elaine Herzberg] comme piéton ni prédit correctement sa trajectoire en tant que piéton ou cycliste piétonnier - parce qu’elle traversait l’avenue en dehors des passages cloutés ».
Or, « la conception du système n'incluait pas la prise en compte des piétons traversant en dehors des passages », explique le régulateur américain. Le Code de la route est une chose, mais on le sait parfaitement : tout le monde n'a pas une conduite parfaite et ne le respecte pas scrupuleusement à la lettre. C'est valable pour les voitures, les piétons, les cyclistes, les trottinettes électriques, etc.
De plus, le changement régulier de catégorie a également empêché une bonne détection de la direction et de la vitesse d'Elaine Herzberg par le pilote automatique.
Lorsque la collision est formellement identifiée à 1,2 seconde avant impact, une manœuvre d'évitement aurait nécessité un changement de trajectoire et un freinage trop important, en dehors des capacités définies dans le système. Il a donc lancé la suppression de son plan, qui s'est terminée une seconde plus tard.
À ce moment-là, « le véhicule était toujours sur la trajectoire d'une collision avec le piéton et, pour l'empêcher, il fallait encore une manœuvre d'évitement extrême. De par sa conception, le système n’a pas actionné d'urgence les freins, mais a fourni une alerte sonore au conducteur du véhicule tout en diminuant la vitesse du véhicule ». La suite, tragique, on la connaît.
37 autres accidents entre septembre 2016 et mars 2018
Pendant l'enquête, ATG (Uber) a partagé avec le NTSB l'ensemble des enregistrements de sa flotte avec au moins un accident impliquant une de ses voitures (responsable ou non) : « Les dossiers ont montré qu'entre septembre 2016 et mars 2018 (à l'exception du crash actuel), il y a eu 37 accidents impliquant des véhicules ATG, qui fonctionnaient en mode autonome ».
Dans la grande majorité des cas (33 sur 37), un autre véhicule est venu heurter la voiture d'Uber, généralement par derrière. Dans deux cas, la voiture autonome « a été endommagée par un piéton qui passait alors que le véhicule était arrêté ».
Il reste donc deux cas. Une borne de piste cyclable occupant partiellement la voie a été heurtée dans l'un, tandis que dans l'autre, le conducteur a repris le volant pour éviter un véhicule arrivant en sens inverse, en heurtant au passage une voiture stationnée.
Uber a pris des mesures, qui auraient pu éviter le drame
Depuis l'accident mortel, l'Advanced Technologies Group (ATG) d'Uber a retiré ses véhicules autonomes pendant plusieurs mois, avant de les remettre doucement en circulation fin 2018. Le fabricant a aussi « modifié la façon dont le système fusionne les informations du capteur et prédit les chemins possibles pour prendre en compte l'historique de suivi ». Ce n'est pas tout, certains systèmes d'aide à la conduite de Volvo restent désormais actifs avec le pilote automatique Uber, notamment l'avertissement de collision frontale et le freinage d'urgence automatique.
Désormais, la phase de suppression n'existe plus en cas d'urgence (elle a duré une seconde à un moment critique pour rappel). En cas de danger immédiat, le système enclenche le freinage d'urgence, même si cela ne permet pas d'empêcher l'accident (au moins il l'atténuera). Désormais, lorsqu'un objet change de catégorie, son historique est conservé afin de calculer au mieux sa trajectoire, sa vitesse et le risque de croiser le chemin de la voiture.
Les enquêteurs du NTSB ont demandé à Uber quelles auraient été les conséquences de l'accident de mars 2018 avec l'ensemble de ces changements sur le pilote automatique. En le simulant avec une version de septembre 2018 du logiciel (qui comporte d'autres changements que ceux mentionnés), Uber estime que le piéton aurait été détecté à environ 88 mètres, soit 4,5 secondes avant l'impact. Après analyse, la voiture aurait freiné un peu plus de 4 secondes avant l'impact, un délai qui aurait été suffisant pour éviter le drame.
Quoi qu'il en soit, nous attendons désormais les conclusions de l'enquête du NTSB sur les causes probables de l'accident. Espérons qu'il ne faudra pas un accident mortel par situation inattendue pour agir. Des changements ont été apportés sur le lieu de l'accident, avec des panneaux d'interdiction de traverser pour les piétons.
Pour rappel, Uber a très rapidement (fin mars 2018) signé un accord avec la famille de la victime, s'évitant ainsi une bataille judiciaire. « L'affaire a été résolue », affirmait simplement l'avocate de la famille.















Commentaires (155)
#1
Intéressant, mais on voit aussi que celle qui a traversé ne faisait vraiment pas attention ! On ne peut pas tout reprocher à l’IA !
On peut juste supposer, car c’est souvent le cas, que le piéton est parti du principe que la voiture allait ralentir en le voyant de loin et ne s’attendait pas à ce que ce soit une IA au volant, IA qui forcément ne détecte pas aussi bien que c’est un piéton comparé à un vrai pilote.
En fait, la première réaction de l’IA devrait être de ralentir tant qu’il ne pige pas ce que c’est !
#2
Ça parait assez fou leur gestion initiale avec suppression de l’historique lors du changement de catégorisation…
C’est vraiment une grossière erreur dans leur développement, car peu importe l’objet, il a toujours une position, direction, vitesse. Aucune logique alors de tout effacer.
#3
#4
Sympa le victim blaming, en attendant la fille est morte, alors que ça aurait pu être évité, malgré son attitude hors cadre légal.
Si t’es conducteur, que t’as un piéton qui traverse devant toi, tu n’accélères pas ou ne fait pas mine de pas l’avoir vu, parce qu’il est en tort, quitte à le tuer…
#5
Alors si on part de ce principe, tout ceux qui traverse au feu rouge pourront se faire écraser par les voitures contrôlées par l’IA par ce qu’ils ne sont pas sensés le faire ?
#6
Donc on a :
Au final, la faute en incombe selon moi en grande partie à la piétonne, avec une voiture normale et même avec un conducteur attentif, l’accident était tout de même très probable.
Ceci étant, tout l’intérêt des voitures autonomes est justement d’éviter ce genre d’accident, et de plus le conducteur aurait du réagir bien avant.
Bref c’est le bordel. Pour citer l’article … “on n’est pas sorti de l’auberge”
#7
#8
#9
#10
L’accident n’est dû qu’à la voiture qui entre en colision avec le piéton. 6sec c’est beaucoup, c’est pas comme si elle s’était jeté sous les roues.
Les responsables ce sont l’IA et l’agent qui branlait rien.
Ce serait un gamin qui courait après son balon, inconscient des dangers car c’est un gamin, ce serait de sa faute aussi ?
#11
Toute mort est tragique, et on ne trouvera pas grand monde pour juger que le victime l’avait bien mérité, quelle que soit sa faute personnelle.
Il faut que cette erreur permette à tous de progresser. Uber doit comprendre comment ils auraient du améliorer leur système, et ça semble avoir été bien fait ici.
Mais à trop se focaliser sur les erreurs du pilote automatique, on semble oublier que cet évènement devrait aussi servir de leçon à ceux qui traversent hors des clous une 2 voies limitée à + de 70km de nuit…
#12
Deux voies !? Désolé mais vu la photo aérienne, à l’endroit ou elle traverse moi j’en compte 4.
Alors oui, évidement, le conducteur qui se la coule douce en matant une vidéo c’est n’importe quoi. Oui l’algorithme est foireux (et merci pour l’article hyper interessant au passage) et j’espère que les devs sont pas tous aussi mauvais.
Mais bordel un piéton qui traverse une autoroute 4 voies de nuit !? Moi la première chose que j’envisagerai c’est clairement l’hypothèse du suicide…
#13
Bien sûr que ce serait la faute du gamin (et de ceux qui auraient du le surveiller).
Et selon le comportement du véhicule, ça serait peut-être aussi la faute du conducteur (en particulier s’il arrivait trop vite au regard des lieux ou a mis un temps excessif à réagir)
Être en faute ne signifie par mériter ce qui nous arrive. Dans cette hypothèse la ‘sanction’ qui tombe sur le gamin (ou sur la cycliste du cas uber) est complètement disproportionnée, tout le monde est d’accord là-dessus. Ça ne retire pas le fait qu’ils n’avaient rien à faire là.
#14
J’abandonne, vous êtes trop de droite en fait.
C’est jamais la faute de la personne qui déplace 1.5 T et qui est censé être maitre du véhicule.
#15
#16
Personne n’a dit que le véhicule et son “conducteur” n’était pas en faute, juste que comme beaucoup d’accidents, il y a plusieurs causes qui ont menées à l’accident.
Si on part du principe que le piéton n’y est pour rien, ça reviendrait à dire que le jour ou toutes les voitures sont pilotée par IA, je pourrais traverser où et quand ça me chante, toute façon c’est à l’IA de m’éviter.
#17
C’est surtout une question d’être binaire ou non.
On n’a pas dit qu’il n’y avait jamais de faute des véhicules, et dans le cas d’Uber, il y a faute évidente de l’IA qui n’a pas su réagir correctement et de la conductrice qui était plongée dans son smartphone.
C’est pas pour autant qu’il ne peut pas y avoir AUSSI une faute du piéton qui traverse une deux-voie en dehors d’un passage piéton.
Je me suis fait faucher une fois (plus de peur que de mal). Je peux te garantir que ça change définitivement la vision qu’on a de la traversée de la route, et notamment qu’on réalise qu’on était avant complètement inconscience des risque qu’on prenait en traversant n’importe comment.
#18
Clairement le programme était très mal développé mais l’intelligence humain n’a pas était non plus très fine non plus. C’était un concours pour savoir qui ignorerait l’autre le plus longtemps possible.
#19
La réalité rattrape la fiction (ou la SF).
On peut citer le problème de l’IA pas au point (une liste de films gravement longue).
Ou que l’on sort une IA sort de son usage conforme. Ex: HAL9000 à qui on a demandé de mentir alors que c’est opposé à ces directives de base.
Et quand bien même ce serait au point. Il restera l’éternel problème de la décision (élcairée ou pas). ex: 2 personnes en danger, 1 robot, un seul sauvetage possible (I-robot). Les critères de sélection pourraient bien s’opposer entre faisabilité et morale.
Et puis quelles seront les répercutions de tels critères (légaux?) vis à vis de la morale ? Il faudra bien le transcrire dans la loi un jour. Seulement la machine n’est pas une ‘personne’. Cela répond pas aux même règles. De plus à partir du moment ou il y a décision, il ne peut pas y avoir innocuité. Juste impossible.
Le piétons n’avait peut être rien à faire là à ce moment. Toutefois dans une approche entrepreneuriale, il ne faudra pas longtemps pour qu’un cadre pense qu’il faudrait changer la loi pour extraire la société de cet étau juridique. Ou d’éventuelles ‘complications’ futures. Uber va tout faire pour se défausser aujourd’hui pour mieux préparer l’avenir. Toutefois le dispositif est sous leur responsabilité. Ca a du bon de signer des accords avec la famille…
On risque d’assister à un changement de perception sur ce thème. Comprendre que la vie humaine vaudra un peu moins cher suivant qu’on est piéton dans son droit ou pas. Car il est évident qu’Uber ou autre n’on pas envie de tirer des chèques tous les 4 matins.
Et on aura un carrousel des crétins qui nous sortiront des excuses du genre “Je nettoyais le fusil et le coup est parti tout seul, m. le juge”. “Le bon vieux c’est pas ma faute, c’est l’IA”. et l’entreprise de répondre qu’elle produit des équipements conforme aux lois et que toutes les mesures on été prise blah blah. A n’en plus finir.
C’est toujours les mêmes schémas quand il y a du business dans la partie.
Note mentale: Acheter un tank. Au moins si je me fait emplafonner par une IA j’aurai rien. Problème : homologuer le véhicule pour la route. sic
#20
#21
#22
Comme le cycliste que j’ai failli écraser, y à une heure, ce con passe au feu rouge alors que c’est vert pour moi, il été à un mètre de voler au cimetière. " />
" />
#23
#24
#25
C’est beau, les voitures autonomes…
Et demain, lors des accidents entre voitures autonomies, quelles assurances vont raquer ? Celles des conducteurs alors qu’ils n’ont rien fait ? Celles des constructeurs ?
#26
Note mentale: Acheter un tank. Au moins si je me fait emplafonner par une IA j’aurai rien. Problème : homologuer le véhicule pour la route. sic
A défaut d’un tank, tu peux déjà commencer par un SUV, ou un Hummer (c’est homologué ^^)
#27
fout un coup de pied en doublant par la droite, à ceux qui n’ont pas de lumières et sont habillés tout en noir.
Tkt je met mon pare-buffle
#28
#29
Même si on peut considérer le comportement de la piétonne comme en parti responsable, c’est la voiture qui lui a foncé dessus et non l’inverse.
Tiens, je vais me poster au milieu de l’A89, et attendre. Ce seront les voitures qui me “fonceront dessus, et pas l’inverse” ;)
Tu vois le ridicule de la situation ? La piétonne EST responsable… et UBER d’avoir fourni un soft pas suffisamment bien codé pour éviter un piéton.
#30
Dites, les gars.
Je veux bien croire qu’on est en fin de semaine mais faudrait arrêter avec la détente cérébrale là.
On va se calmer avec le slutshaming/victim bashing parce que là, les commentaires prennent des airs zemmouriens pas franchement reluisant.
C’est le débat sur le voile qui vous a mis dans cet état?
Faut arrêter avec bfm tv et cnews, ça aide pas à la réflexion.
Allez, pour se décrasser un peu de ces commentaires salissants, on va faire un petit rappel à la loi (art. R412-34 et suivants du Code de la route):
Si on appliquait le droit français à cette affaire, la piétonne était tout à fait dans son droit, et le conducteur était totalement en tort.
Bref, pour résumer, si vous êtes automobiliste, VOUS AUREZ TOUJOURS TORT FACE A UN PIÉTON, même s’il se jette sous vos roues.
La logique est simple: c’est celui qui manipule le véhicule qui est responsable, l’idée étant que le véhicule est une arme. Si tu ne sais pas t’en servir, si tu as peur de causer un accident, alors ne l’utilise pas
#31
La deux voies identifiée ici n’est pas une autoroute, c’est une avenue.
La piétonne n’est en rien responsable: il appartient au conducteur d’être vigilant et de réagir en cas de danger. Il a passé un permis pour ça, à lui de respecter les règles.
Merci d’arrêter avec la mauvaise foi.
#32
#33
C’est fou cette volonté de vouloir simplifier le problème en cherchant UN coupable.
Y’a pas de faute de l’un plutôt que de l’autre.
C’est une somme de condition qui ont provoqué un drame.
Enlever l’une de ces conditions, y’a plus de drame.
Oui si la cycliste/piétonne n’avait pas traversé la route, elle serait pas morte.
Si le conducteur avait fait son taf, peut être aurait-il pu stopper le véhicule à temps
Et avec un autre algo, l’IA aurait eu une réflexion différente, et donc une réaction différente.
Mais globalement, c’est bien la conjonction des 3 qui a déclenché le drame et on peut pas y faire grand chose.
Maintenant l’idée c’est juste d’éviter que ces conditions soient à nouveau réunies.
#34
#35
Il y a 35 000 accidents par an en France d’animaux sauvages qui se jettent sur une voiture… un humain freine quant il voit un bestiau se rapprocher, pendant que l’IA perd son temps à essayer de comprendre ce qu’il se passe " />
" />
 " />
" />
Dans deux cas, la voiture autonome « a été endommagée par un piéton qui passait alors que le véhicule était arrêté ».
Il y a vraiment des piétons qui se jettent sur des voitures à l’arrêt? Ils sont bizarres les Américains
#36
#37
Un “vrai pilote” peut aussi être distrait.
 " /> Un piéton qui traverse en espérant que le conducteur va s’arrêter sans s’assurer que ce dernier a commencé à ralentir donne du grain à moudre à la sélection naturelle.
" /> Un piéton qui traverse en espérant que le conducteur va s’arrêter sans s’assurer que ce dernier a commencé à ralentir donne du grain à moudre à la sélection naturelle.  " />
" />
Il y a des accidents tous les jours sans qu’une IA y soit pour quelque chose.
#38
#39
Pour rappel, Uber a très rapidement (fin mars 2018) signé un accord avec la famille de la victime, s’évitant ainsi une bataille judiciaire. « L’affaire a été résolue », affirmait simplement l’avocate de la famille.
CGU d’Uber :
Pour bénéficier de notre expérience utilisateur avec rémunération :
-adoptez un enfant
-passez-le sous les roues d’un Uber
-demandez à éviter le procès pour toucher la prime
-remboursez le prix du passeur
Uber vous remercie de votre participation à l’étude du service expérience utilisateur avec rémunération
Ne pas lire les CGU n’est pas plus mal en fait.
#40
#41
Un point qui n’est pas forcément abordé ici c’est le fait qu’a T - 1.2s (quand le calculateur détermine la trajectoire de collision sérieuse) , l’option de donner un coup de volant d’évitement n’est pas envsagée. C’est pourtant ce qu’aurait fait un conducteur humain : A 1s de la collision, si tu vois un pieton devant , t’écrases le frein et tu braques.
Oui, c’est sans doute idiot, car ton freinage interviendra trop tard, et le coup de volant risque de te faire partir en vrille. Malgré tout , c’est un réflexe, et même consciemment c’est “logique” : Toi t’es dans une voiture avec des airbag partout , donc tu peux survivre.
Le piéton à 70km , à l’impact il a aucune chance.
Là, le calculateur a clairement fait un compromis en faveur du conducteur , solvable et client, face à une femme en vélo .
Je ne suis pas sur que ce genre de choix doive être laissé aux constructeurs.
#42
« La victime est responsable parce qu’elle n’a pas traversé sur un passage clouté », sérieusement ?
Tout le monde traverse hors des passages cloutés, cette situation arrive tout le temps et partout (vous sortez de chez vous un peu ?) De chez mes parents à la cambrousse, le 1er passage clouté est à plusieurs kilomètres, avec cette logique je devrais vraiment faire un détour de plusieurs kilomètres pour aller voir mon voisin d’en face ? Sinon une IA est légitime pour m’écraser parce que je ne respecte pas ses règles arbitraires ? Non parce que dans le droit commun, un piéton traverse où et quand il veut, et le conducteur est responsable de son véhicule. Et ce parce qu’en cas de choc, y’en a un qui va faire beaucoup plus de mal à l’autre, quelle que soit la situation.
Aussi, vous avez regardé la photo ? Il y a un croisement prévu pour les vélos, et aucun passage piéton.
Si en vélo tu crèves un pneu sur la route, si t’as un claquage, si te fait renverser, etc. et que tu te retrouve à pied, tu deviens responsable des automobilistes qui t’arrivent dessus ?
Si l’IA n’est pas capable de gérer l’imprévu, elle n’a rien à foutre aux commandes d’un véhicule, parce que l’imprévu encore une fois, il arrive partout et tout le temps, et que l’enjeu c’est quand même la vie des gens. Y compris de ceux en situation imprévue. Sans compter qu’un système qui n’arrive pas à catégoriser un objet commun aux abords des routes, c’est une aberration, mais s’il choisit de maintenir sa vitesse alors qu’il sait que quelque chose ne va pas, alors c’est beaucoup + con que de traverser une route de nuit. Avec des défauts pareils, je suis très surpris qu’aucun accident lié à ce paramétrage n’ai eu lieu avant.
Certes les pilotes sont carrément faillibles, mais si les IA ne sont pas capables de gérer des situations que l’humain sait résoudre, quel est l’intérêt ? Pouvoir mater son smartphone pendant le trajet ? Bonne nouvelle, ça c’est gagné.
#43
#44
#45
Même si un jugement déterminera quelle “partie” est en tord, c’est bien la conjoncture de ses trois conneries qui on abouti à ce drame.
#46
#47
#48
#49
#50
“On touche au problème lorsqu’un objet change de catégorie : son historique n’est plus pris en compte pour le calcul des trajectoires possibles.”
Les mecs qui ont osé concevoir une bouze pareille sont des putains de criminels. Même un étudiant en première année d’informatique n’oserait sans doute pas être aussi crétin.Il ne faut pas plus de 5 sec de réflexion à une personne normalement constituée pour dire, à la question “comment tu ferais pour détecter et anticiper un objet en utilisant plusieurs capteurs”, “je rassemble toutes les sources pour faire un suivi unique avec un ‘identifiant’ unique”.
#51
#52
La vidéo de l’accident est facilement trouvable sur Youtube (vidéo officielle de la Police, coupée juste avant l’impact postée par Euronews).
La cycliste, qui traverse en marchant à côté de son vélo, est dans une zone d’ombre complètement noire. Même si la conductrice avait été attentive (elle quitte clairement les yeux de la route vers son téléphone plusieurs secondes) l’impact me semble inévitable (après, à voir si les conditions lumineuses étaient bien équivalentes à celles rendues par la dashcam qui ne sont pas des caméras cinéma quoi…)
Par contre, grosse faute du système qui n’a pas besoin normalement de lumière pour détecter les objets : pas d’obstacle, pas d’autres véhicules…
Uber aurait pu justement montrer là la supériorité sécuritaire d’un véhicule autonome, raté pour eux…
Une fois de plus, excellent article de votre part, fouillé, complet, avec le recul qu’il faut, vous faites plaisir à lire.
Je trouve juste qu’il manque un bouton “pouce bleu” sous chaque article.
#53
#54
Il faut prendre les choses factuellement et rationellement, pas émotionnellement. Sinon ce genre d’accident arrivera encore.
L’IA a été mise en défaut face à cette situation tragique, et est responsable de l’accident.
Mais le piéton, quoiqu’il arrive est aussi responsable de ses actes (un humain sait faire preuve d’intelligence), et un piéton qui traverse sans regarder et en comptant uniquement sur le bon réflexe des véhicules, ne peut pas s’attendre à ne jamais avoir d’accident.
Si on agissait tous ne comptant que sur le bon réflexe des autres véhicules sur la route, le nombre d’accident par an serait bien plus élevé !
Le fait qu’une personne soit morte, ne la déresponsabilise pas enitèrement de sa mort si elle a été imprudente !
#55
Juste je voudrais quand même rajouter un point concernant la configuration de l’accident.
Tout le monde ici parle de piéton, mais en réalité c’était un cycliste pied à terre.
De mon point de vue, le fait d’avoir son vélo à la main, aurait du obliger le cycliste à utiliser la route et non de se faire passer pour un piéton (ce qui interdisait donc la traversée perpendiculaire).
Et sinon pour ceux qui veulent “voir” les conditions de l’accident :https://twitter.com/TempePolice/status/976585098542833664
C’est la vidéo diffusée par la police d’Arizona
Personnellement, je crains que je n’aurais pas pu réagir à temps vu “l’apparition” du vélo aussi tard (pour mes yeux, je compte 3 secondes seulement pour réagir, alors que le radar qui “voit dans la nuit” a eu lui le double de temps)
#56
Ça pause une vrai question, le comportement décrit est clairement éloigné d’une IA, c’est un bête algo codé à la main,on ne peut pas être considéré que ce véhicule est autonome.
La détection d’un objet ne doit pas être lié à l’emplacement où il se trouve ! La détection ne doit pas avoir d’apriori, est un objet détecté doit avoir plusieurs catégories.
Par ex : piéton 80%, cycliste 60%, objet statique 30%. C’est l’IA qui doit ingurgiter ces paramètres plus d’autres (vitesse, composition des voies, panneaux en cours ou passage piéton…) pour prendre la décision la plus probable et/ou sécurisée.
Si chaque composant simplifie sa vision (prend des décisions sans tout la vision du contexte), c’est équivalent à laisser conduire un aveugle guider par un GPS et de l’électronique moderne (détection de frnahcissement de ligne, régulateur de vitesse adaptatif aux panneaux et véhicules devant…). ça peut sans doute fonctionner quelques km, mais c’est de l’inconscience pûre !!!
#57
” il n’était pas sur un passage clouté”
C’était pas un accident alors, c’était un suicide.
Après, effectivement, si l’IA se limite au code de la route, ça va pas le faire. On n’est pas encore dans le cas où toutes les voitures sont autonomes et respectent le Code.
#58
Dans la grande majorité des cas (33 sur 37), un autre véhicule est venu heurter la voiture d’Uber, généralement par derrière.
C’est alarmant ça veut dire quoi ? Un véhicule autonome qui freine sans raison (faux positif), trop fort par rapport à la situation, ou alors qui change de voie au dernier moment !?
En bricolant l’algo suite à la mauvaise détection du piéton, ils vont augmenter les faux positifs, les freinages intempestifs et les accidents par collision d’un autre véhicule.
C’est vraiment du bricolage sauce Start-up (code à l’arrache, et plein de comm’ avec des mots à la mode)
J’ai déjà croisé un véhicule autonome en ville une volvo avec un barda sauce google car d’1m haut sur le toit. La caisse m’a fait une énorme queue de poisson sans clignotant alors que j’étais sur une voie de dégagement à sa droite avec mon clignotant.
J’ai compris la raison en peu plus tard le véhicule est resté en plein au milieu de la voie qui était en train de s’élargir, elle n’a serré le bon côté de sa destination qu’au moment où le pointillé du milieu commence à être peint sur la chaussée.
Tu fais ça à l’examen du permis tu finis même pas ta session, il y’a un grand coup de frein et tu repasses passager illico !
Aucune anticipation, aucun respect des angles morts / rétro, le clignotant au moment du coup de volant, c’est le briefing avant la première leçon de conduite ça !
#59
Juste un commentaire pour éclairer un peu ceux que ça “choque” de voir qu’un objet “perd” son historique quand il change de catégorie.
C’est malheureusement un problème propre à la vision d’un ordinateur :
Il faut bien s’imaginer que le système c’est un programme qui comme tout programme reste “con”, c’est pas de “l’intelligence” artificielle, c’est de l’analyse statistique dans un programme.
Et dans un programme on manipule des des variables.
un programme de vision fait plusieurs choses qu’on va séparer en groupes, plus ou moins indépendants :
Tout d’abord, une partie du programme traite l’image fournie par la caméra :
Chaque objet vu se voit affecter un nom de variable pour pouvoir le ranger dans la mémoire, le catégoriser et le traiter.
Si il voit un truc il commence par l’appelle par exemple “obj_25458”
“obj_25458” est un tableau, qui contient tout ce qui est utile comme renseignements.
Il lui affecte d’ores et déjà quelques caractéristiques suivant ce qu’il a reconnu.
par exemple il dit “ça a toutes les chances d’être une poubelle, sa position est X,Y”
et cette partie du programme répète l’opération pour tout ce qu’elle trouve dans son champ de vision
C’est une des étapes les plus critiques puisque cette partie référence tous les objets.
En parallèle, c’est une autre partie du programme traite les infos en provenance du lidar.
Lui ne voit pas assez nettement les formes pour pouvoir les ranger dans des catégories, mais il vapouvoir fournir l’information de distance nécessaire pour compléter le tableau pré-rempli par l’algorithme de vision
une autre partie du programme va ensuite faire le tri dans tout ce qui est vu.
un objet que la partie vision à catégorisé comme “poubelle” est classé dans les objets “autres” qui entre nous sont la plupart du temps des objets statiques peu dangereux tant qu’ils sont pas en feu ou au milieu de la route
un objet de type véhicule ou pieton par contre va avoir droit à un traitement plus poussé
ces choix de sélectionner et traiter certaines infos mieux que d’autres c’est juste indispensable sinon il faudrait un calculateur de la nasa embarqué dans chaque voiture
Maintenant le problème :
A l’instant T, mon objet “obj_25458” était considéré comme une poubelle position X,Y,Z
A l’instant T+1 mon véhicule à avancé, mon objet “obj_25458” est toujours considéré comme une poubelle position X2,Y2,Z2.
Maintenant je sais calculer sa vitesse vu que j’ai deux coordonnées dans l’espace. Mais mon véhicule s’est aussi déplacé.
Calculer la vitesse de l’objet poubelle implique donc de déduire le déplacement du véhicule, et comporte forcément quelques erreurs et approximations.
Mon objet poubelle était classé dans “autre”, donc je vais pas utiliser du précieux temps CPU pour calculer au millième près sa vitesse. Un calcul rapide suffira, et ce calcul me donne une vitesse proche de zéro
On va donc ignorer cet objet et le considérer statique
Maintenant à l’instant T+2, mon véhicule s’est rapproché de cette poubelle et lorsque l’algorithme de vision à balayé l’image, il ne voit plus de poubelle, mais il reconnait maintenant un vélo
il créé donc une nouvelle entrée dans son tableau “obj_99922” et le range cette fois dans les bonnes cases
A l’instant T+3, “obj_99922” n’est plus reconnu, c’est de nouveau une poubelle qui est vue, on va l’appeller “obj_2000”
Vous commencez à voir le problème ?
Même si il y a une partie du code qui fait le tri et fusionne les données qu’il suppose identiques, à un moment où un autre un objet est “perdu de vue” ou a changé de nom de variable, il est pour ainsi dire perdu
c’est pas un choix du développeur mais un algo, aussi performant qu’il soit, ne sait pas aussi facilement que nous fusionner des données au fur et à mesure que sa vision change
Ca viendrait à l’idée de personne que le programme fusionne arbitrairement des variables, là encore c’est des choix de probabilités.
#60
#61
#62
#63
“Ca viendrait à l’idée de personne que le programme fusionne
 " />
" />
arbitrairement des variables, là encore c’est des choix de probabilités.”
Donc en conclusion, on ne peut pas appeler ça de l’IA mais du calcul de probabilités … CQFD
#64
Oui absolument, le terme serait bien plus exact
#65
Faut pas se leurrer le choix de ne pas garder l’historique n’est pas un soucis de mise en commun des variables, c’est un peu la base d’un véhicule autonome d’utiliser les différents capteurs pour “voir” le monde extérieur, si ils ont viré l’historique c’est pour un gain de perf facile, ca toune pas sur des bi core xeon avec 512 go de ram une voiture, plutot que d’optimiser le code, zou on vire l’histo ca va plus vite.
#66
Moi ce que j’en retire, c’est qu’on arrive pas encore au niveau du cerveau d’une mouche en stratégie d’évitement de collision.
#67
#68
#69
#70
C’est un peu éxagéré de dire que par pur souci économique on va faire “exprès” de faire un truc bâclé et tant pis si ça tue des gens…sur un véhicule de test, pas sûr que le hardware soit soumis aux restrictions budgétaires nécessaires pour un véhicule de série..
Ensuite si je te donne une image de la route : combien d’objets es-tu capable de reconnaître ?en observant bien, tu va pouvoir distinguer du gravier à la feuille d’arbre, soit un sacré paquet de choses tout de même.ça fait facilement plusieurs milliers (millions?) d’objets.Maintenant fais ça 30 fois par secondes et maintenant calcule combien de données à traiter ça représente sur une durée de 5 minutes.
Sans filtrer un peu les infos dès la source, c’est très vite impossible de faire un quelconque traitement. même avec un hardware presque illimitéUn humain filtre très bien ce qui est pertinent d’observer. Une IA c’est moins évident mais ça filtre aussi.
Mais surtout un humain sait se dire “merde ce carton a bougé, puis 2 secondes après : ah mais en fait c ‘était pas un carton mais un chien !“parce que quand on a un doute sur un objet une partie de nous plus ou moins consciente va concentrer un peu plus d’efforts d’observation pour lever le doute.une machine ça reste une machine, ça ne sait appliquer que des comportements pré-établis. Et c’est pour ça que ça reste des maths, des statistiques, mais surement pas de l’intelligence.
#71
Intéressant. Ca prend vraiment tant de temps que ça que de calculer la vitesse absolue d’un objet ? Car pour moi, ça se règle en quelque calculs (qui plus est seulement des soustraction et des addition) qui sont même exécutable comme une matrice sur une GPU (ou sur un CPU avec une instruction comme l’AVX/SSE):
Pabs_t0=Prelative_t0
Pabs_t1=Prelative_t1-deltaPos_t0-t1
V_t0-t1=Pabs_t1-Pabs_t0
après, je pense que ce calcule est un peu brut, et que ce qui prend du temps, c’est adoucir les petites imprécisions (le petites erreurs s’additionne lorsque l’on commence à faire des delta). On peut par exemple utiliser une inertie Vinertiel :
Vsoft_t0-t1=aVinertiel+(1-a)V_t0-t
Vinertiel=Vsoft_t0-t1
Le paramètre a (compris entre 0 et 1) va donner plus d’importance à l’inertie passé. Le problème d’un tel calcule c’est qu’il a tendance justement a être “en retard”. Une solution serait peut-être d’ajouter le calcule de l’accélération.
#72
Je constate surtout que le véhicule n’a aucune catégorie du type Animal, ou encore Objet poussé par un vent fort…
#73
Oula, je me sens vachement insulté.
Niveau d’impact du commentaire? pas plus que zero.
(il est bien plus facile d’être maitre de son corps que d’un véhicule…)
#74
Dredi!!!!!
#75
On peut avoir 3 cons, je ne vois pas l’intérêt de dire que tel ou tel est plus que l’autre.
Et un con mort reste un con, mais oui sa mort est triste.
Ici on a 3 erreurs, et
le conducteur n’est pas responsable de l’erreur du véhicule,
le véhicule n’est pas responsable de l’erreur du piéton,
le piéton n’est pas responsable de l’erreur du conducteur.
#76
Si je meurs comme ça, je mourrais en disant “mais quel con!”
Surtout si j’ai bu, encore plus si j’étais sobre…
Et pas besoin d’IA pour parler d’engin de mort. Depuis qu’on m’a forcé à avoir un permis, je considère ce dernier comme un permis d’arme. Mortelle.
#77
Disons que vu la zone, s’il faut attendre de trouver un passage piéton pour traverser c’est pas gagné…
Je ne sait pas ce qu’il en est aux USA mais en France on a le droit de traverser hors passage piéton tant qu’on est à plus de 50m d’un tel passage (et là c’est clairement le cas).
Et 6 sec c’est énorme (d’ailleurs un conducteur aurait certainement repéré le piéton/cycliste avant).
Bref, la personne à traversé la route à cet endroit car il n’y avait pas de passage piéton, bien en amont de l’arrivée d’une voiture, et s’est fait percutée car l’IA n’est pas au point et surtout le conducteur humain ne regardait pas la route.
#78
“A l’instant T, mon objet “obj_25458” était considéré comme une poubelle position X,Y,Z A l’instant T+1 mon véhicule à avancé, mon objet “obj_25458” est toujours considéré comme une poubelle position X2,Y2,Z2. Maintenant je sais calculer sa vitesse vu que j’ai deux coordonnées dans l’espace. Mais mon véhicule s’est aussi déplacé. Calculer la vitesse de l’objet poubelle implique donc de déduire le déplacement du véhicule, et comporte forcément quelques erreurs et approximations. Mon objet poubelle était classé dans “autre”, donc je vais pas utiliser du précieux temps CPU pour calculer au millième près sa vitesse. Un calcul rapide suffira, et ce calcul me donne une vitesse proche de zéro On va donc ignorer cet objet et le considérer statique Maintenant à l’instant T+2, mon véhicule s’est rapproché de cette poubelle et lorsque l’algorithme de vision à balayé l’image, il ne voit plus de poubelle, mais il reconnait maintenant un vélo il créé donc une nouvelle entrée dans son tableau “obj_99922” et le range cette fois dans les bonnes cases “
“En parallèle, c’est une autre partie du programme traite les infos en provenance du lidar. Lui ne voit pas assez nettement les formes pour pouvoir les ranger dans des catégories, mais il vapouvoir fournir l’information de distance nécessaire pour compléter le tableau pré-rempli par l’algorithme de vision ”
Tu vas me dire “ça coûte cher, c’est super compliqué” ? Je veux bien te croire, mais c’est pour ça que rien ne vaut l’humain à qui tu fournirais simplement l’accès aux informations fournies par un ou deux capteurs.
—-> Inutile d’avoir une soi-disant intelligence artificielle chimérique, ou même les “assistants” actuels qui sont essentiellement pète-couilles. Imposons l’installation de quelques capteurs de ce type sur les véhicules, avec remontée d’informations sonores ou visuelles, l’humain, LUI, sait parfaitement exploiter la connaissance, et SURTOUT, son absence.
#79
Voici l’accidenthttps://youtu.be/ufNNuafuU7M, je sais pas si j’aurais vu le pieton traverser la route….
#80
Difficile de comparer la vision humaine à celle d’une caméra.
La gestion des contraste est beaucoup plus dynamique pour l’oeil humain et un simple mouvement perçu bien avant peu éveiller l’attention.
En ville il m’arrive souvent de deviner un mouvement derrière une fourgonnette stationnée pour anticiper le piéton qui va se jeter sous mes roues.
#81
#82
#83
L’IA a énormément de défauts, donc effectivement, faut corriger. Mais je plussoie aussi le fait que le piéton a pas été très malin… on traverse pas une route à grande vitesse les yeux fermés, normalement tu le vois que la voiture arrive à pleine balle sans faire mine de ralentir ou esquiver… si je devais compter sur le réflexe des conducteurs, je serais mort quelques fois déjà.
Et même en temps que conducteur, j’ai frôlé la catastrophe quelques fois, les gens qui traversent sans regarder sont suicidaires… oui ils sont prioritaires, mais on les voit pas toujours… et en attendant la priorité va pas te sauver la vie.
#84
Exactement.
#85
#86
Je trouve les commentaires, de chaque côté, presque pire que le logiciel de la voiture…
On a droit à tout. Du bashing gratuit sur la victime, sur les développeurs, sur ceux qui mettent le test en place, le tout sans avoir la moindre once de contexte, ni sur comment ça a été développé, ni sur les circonstances complètes de l’accident, ni même sans prendre du recul par rapport à une situation sans IA…
On a aussi droit à un rappel au code de la route, qui ne contient aucune règle sur le fait de traverser ou pas une autoroute, c’est bien pour ça qu’on voit des gens traverser des autoroutes en permanence…
La seule personne en tort ici, est l’agent derrière le volant. Non pas parce qu’elle n’a pas réussi à éviter l’accident, car on ne saura pas si c’était humainement évitable (rappel, il faisait très sombre, et on ne sait pas à quel point le piéton était visible), mais pour ne pas avoir fait son taff, à savoir rester concentré sur la route.
Tout le reste est juste hors sujet…
#87
par véhicule, j’entendais l’IA.
#88
Une IA est censée être LARGEMENT supérieure à une IH. SInon, c’est du pipeau…
#89
Nous vous souhaitons de passer sous les roues d’une voiture pilotée par une IA.
#90
#91
#92
Tu sors encore une fois de mon exposé… ce que tu affirmes, c’est ce que j’ai affirmé dans mon point 3: le conducteur a fait une erreur (et c’est le manque d’attention).
On tourne donc en rond là. Je pointe du doigt un algo, ou une équipe d’experts (qui ont fait une erreur), et tu insiste pour reporter CETTE erreur sur le conducteur.
Non, il n’y est pour rien, sur CETTE erreur.
#93
J’invite les commentateurs à jeter un oeil sur les photos des lieux de l’accident qui sont en lien dans l’article. On pourra pointer un coupable supplémentaire : l’aménagement des lieux.
La zone centrale contient une voie piétonne qui ne donne sur aucun passage pour piéton et qui se termine par un panneau rappelant l’interdiction de traverser en dehors d’un passage… panneau qui n’est pas visible depuis la zone piétonne mais depuis la route (apparemment les autorités locales se sont dit depuis que ça n’était peut-être pas la meilleure idée du monde).
D’ailleurs, en regardant un peu la zone de l’accident par une vue aérienne (pour voir un peu au-delà), j’ai du mal à comprendre comme un piéton qui échouerait sur cet îlot au milieu des voies peut en sortir sans traverser “n’importe comment”.
#94
#95
Je n’ai jamais dit ça.
Enfin bref.
(au fait, même après les tests, ça ne sera jamais fiable à 100%…)
#96
Je ne comprends pas cette phrase:
 " />
" />
“Dans deux cas, la voiture autonome « a été endommagée par un piéton qui passait alors que le véhicule était arrêté »”
C’est le fameux problème du platane qui traverse sur une ligne droite? OU c’est vraiment des gens qui ont “agressé” le véhicule sans raison?
#97
C’est le principe de base, mais même cette règle là n’est pas respecté par les humains….
L’anticipation est une chose qui se perd complètement sur la route (en plus des distances de sécurité mais ça c’est un autre point)…
#98
#99
#100
Mais pas que!
L’anticipation ce n’est pas que la distance.
Exemple simple, je suis une file de voiture, je regarde au delà de la voiture devant moi, si ça freine, alors avant que le véhicule devant moi ne freine, je vais décélérer.
Maintenant autre cas précis, et ou j’ai franchement peur que l’ia ne soit pas capable de réagir.
Quand on voit quelqu’un sur le bord de la route, que ça soit un animal, un gamin, on ralenti avant. Perso même je prévoie la possibilité de m’arrêter MEME si sur l’instant au moment ou je regarde “l’obstacle” n’en est pas un….
Comment l’ia va t-elle comprendre: “Le gamin est seul, ou le gamin n’est pas tenu par la main, attention il peu traverser, il faut que je décélère quand même alors qu’il n’y a pas d’obstacle réel”?
Idem, un animal sauvage est sur le bas côté immobile. Avec leurs algo ce n’est pas un obstacle.
Le véhicule ne va réagir que si la trajectoire est susceptible de traverser la notre!
Or si un animal avance même parallèle à nous, il peut changer de direction brusquement.
Idem j’approche d’un bus, ou d’un véhicule qui masque la vue, je décélère et prévoie l’arrêt au niveau de l’avant, parce qu’il y a toujours une personne qui déboîte ou peu déboîter.
Tout ça ça s’appelle le jugement, l’expérience ET l’anticipation, je ne vois pas comment une ia va gérer ça.
#101
La vraie raison de l’accident, c’est que quelque part sur le Web, un utilisateur a foiré un CAPTCHA.
(et tant pis si quelqu’un l’a déjà posté au milieu de ce monceau d’engueulade)
#102
Eh je vais pas faire le difficile mais depuis la source cité :
Les piétons doivent traverser la chaussée en tenant compte de la visibilité ainsi que de la distance et de la vitesse des véhicules.
Ils sont tenus d’utiliser, lorsqu’il en existe à moins de 50 mètres, les passages prévus à leur intention.
passage prévu à leur intention, les piétons doivent emprunter la partie
de la chaussée en prolongement du trottoir.
Article R412-43
présente section est puni de l’amende prévue pour les contraventions de
la première classe. Et d’après ce que j’ai lu le véhicule ce déplaçait à son max. à 70km/h le choc à eu lieu 6sec après.
La largeur d’un Volvo XC90 : 2,008m
Un la vitesse de marche moyenne d’un piéton c’est 4,5 km/h aller je retiens 4km/h qui est encore plus lent.
En retenant tout ça la voiture à parcouru env. 116m , le piéton lui avait donc 2m en zone de risque.
A 4km/h on fait 1,10m par seconde donc avait deux secondes pour être en sécurité.
Je suis désolé mais, oui le piéton c’est littéralement jetté sous les roues du véhicule…. Intelligence artificielle au rabais ou conducteur réel inattentif, le résultat est là.
Le piéton s’est délibérément mis en danger en s’imposant.
Vu l’endroit le piéton en apercevant la voiture n’aurait jamais dû persisté dans son entreprise.
#103
Merci pour la source.
je rajouterai que je ne sais pas pour les USA, mais En France les catadioptres es obligatoires.
https://www.service-public.fr/particuliers/vosdroits/F34169
Sauf mauvaise interprétation de ma part je n’ai pas l’impression que le cycliste en avait lattéralement sur son véhicule.
#104
J’aurai éventuellement être de ton avis à une nuance prêt. L’incident s’est fait de nuit.
Sur la vidéo de la police, même en connaissant je n’arrive pas à distinguer le cycliste à moins de 2 sec de l’impacte.
#105
Merci NextInpact pour ce sujet magnifique qui permet à tout un chacun de troller à qui mieux mieux.
A votre avis, quand les logiciels des voitures autonomes seront arrivés à un degré de perfectionnement satisfaisant (dans quelques années, 10 ans au plus) les voiture autonomes feront elles plus de mort sur nos routes que les “bons” conducteurs que nous croisons tous les jours (vitesse excessive, pas de respect des distances de sécurité, freinages intempestifs, queux de poisson après dépassement, oubli d’allumage de feux de code quand la nuit tombe où qu’il pleut, etc, etc …).
#106
#107
#108
#109
C’est une vidéo.
De nuit la dynamique de luminosité des appareil actuel est bien moindre que celle de l’œil.
Bref, impossible de se faire une idée avec cette vidéo.
En revanche on peut se faire une idée avec les distances en jeu.
#110
#111
J’ai cité cette règle 10 commentaires plus haut, là je précisait juste qu’il n’est pas nécessaire de faire un détour de 10km pour prendre un passage piéton.
Quoi qu’il en soit, ça ne change pas le fait que les piétons peuvent mésestimer les vitesses des véhicules et surestimer leur propre visibilité (surtout la nuit), que l’aménagement routier peut être mal conçu (c’est le cas ici), que la signalisation peut être absente ou inadaptée (c’est le cas ici), l’éclairage insuffisant (c’est également le cas). Il ne faut donc pas seulement tenir compte des règles (qui servent surtout à harmoniser les comportements pour diminuer le nombre de situations surprenantes) mais aussi et surtout de la situation réelle à chaque instant. Il faut savoir renoncer à sa priorité pour diminuer le risque (c’est le B-A BA de la survie des usagers vulnérables).
Dans cet accident précis, qui n’a peut-être pas grand chose à voir avec la règlementation française de toute façon, il y a une conjonction de facteurs qui rendent la situation très complexe :
La victime s’est retrouvée au milieu d’une avenue où la limitation de vitesse est élevée alors qu’elle était quelque secondes plus tôt sur un trottoir bien protégé. Elle ne s’attendait peut-être pas du tout à cette situation.
Le pilote automatique a complètement chié dans la colle face à une situation hors norme. Il est intéressant de noter que la victime a eu le temps de traverser trois voies et demi avant la collision. Il est probable qu’un conducteur humain aurait mis un coup de volant vers la gauche en la voyant à la dernière seconde. Il est également probable qu’un conducteur attentif aurait freiné au moment où elle s’est engagée. Un conducteur raisonnable réduit sa vitesse en ville la nuit, car les piétons semblent toujours surgir de nulle-part (il sont peu visibles et peu nombreux).
#112
#113
Heu non non pas du tout.
S’il est certain que le comportement du “conducteur” était complètement repréhensible moralement, civilement et pénalement, un certain nombre d’INpactiens (que je remercie au passage pour l’avoir fait pour tous) ont été investiguer plus en profondeur le contexte de l’accident, et notamment l’environnement et la vidéo.
Plusieurs soulignent que le contexte rendait très improbable la possibilité pour le conducteur d’éviter l’accident, fût-il au taquet dès le premier instant où percevoir quelque chose humainement était possible. Au mieux il aurait pu ralentir, évitant peut-être le décès du piéton?
Les principaux responsables sont les développeurs qui ont osé sortir une pareille bouze. Sans déconner, audelà de la débilité profonde de certains des principes de conception (relevés et détaillés dans l’article inutile d’y revenir) quand bien même il eut été impossible de concevoir différemment (ce qui est faux, la preuve dans l’article)…
Quand un capteur change de catégorie une forme plusieurs fois en une/deux secondes (ce qui implique en creux qu’il n’est pas capable de réellement déterminer la nature de l’objet), TU RALENTIS ET TU SIGNALES PAR TOUT MOYEN AU CONDUCTEUR QU’IL LUI REVIENT DE TRAITER ET DECIDER.
#114
#115
#116
#117
Le code de la route stipule qu’un conducteur doit rester maître de son véhicule en toute circonstance. Un humain qui tuerait un piéton hors des clous alors qu’il l’a vu 10 secondes avant l’impact aurait très certainement à faire face à des conséquences pénales.
Cet exemple démontre qu’une IA n’a aucun bon sens et qu’elle adoptera donc de temps en temps des comportements totalement absurdes et imprévisibles.
#118
#119
#120
#121
#122
#123
#124
Oui, difficile de comparer. Le problème n’est pas la partie optique. Le cerveau humain est extrêmenent doué pour repérer les entités ou objets en mouvement et les reconnaître. Les objets sont reconnus longtemps avant que l’on en prenne “conscience”.
Difficile de reproduire avec un peu de technologie en quelques ce que nos super-ordinateurs de cerveau triés sur le volet par plus de 200 000 ans de sélection.
Et même lorsque l’on sera capables de faires des IA aussi performantes pour la reconnaissance, restera le problème des choix à faire (morale vs utilitarisme, etc.).
En l’état actuel, ce que l’on a est super pour faire de l’ assistance à la conduite, pas pour remplacer le conducteur
#125
#126
Je pense que technologiquement, on est encore loin de faire du niveau 5, l’algo n’est pas encore là.
Le Niveau 4 est difficile et en l’état actuel des routes et de la circulation dessus. L’humain derrière le volant sera indispensable encore longtemps.
Comme tu le dis, il faudra surement aménager les routes pour aider les programmes en particulier pour réduire ou contrôler les cas rares qui sont justement trop rare pour avoir suffisamment d’exemple pour apprendre.
Le niveau 3 est selon très dangereux, car bercé par l’absence d’action, la personne derrière le volant risque de perdre totalement son attention sur la route. Ce genre de chose est connu par exemple chez les conducteurs de trains et c’est exactement ce qui c’est passé ici.
#127
Je ne souhaite bloquer en rien les “objectifs” des futurs systèmes de conduite automatisée ni ne remet en cause le fait que les infrastructures actuelles ne sont pas adaptées.
Par contre, à l’heure actuelle et tant que les IA de conduite ne seront pas à même de faire de véritables choix considérés par accceptables par le conducteur du véhicule (et non un choix du constructeur), je reste sur mes positions, merci.
Ce n’est pas à lhomme de se plier à la technologie, mais l’inverse. On peut me mettre un #vieuxcon ou autre tant qu’on veut, mais jusqu’à maintenant, tout tend à montrer que ces systèmes ne sont pas prêts à être mélés au traffic tel qu’il se passe dans la plupart des pays (et on ne parle même pas des pays où l’infrastructure est à la ramasse)
#128
#129
Le niveau 5 c’est encore de la SF, clairement.
 " />
" />
Après plus de 30 ans de métro autonome, ceux-ci ont toujours un poste de conduite intégré (c’est juste qu’il n’y a pas de cabine dédiée) et sont surveillés durant toute l’exploitation.
Alors qu’il n’y a pas plus balisé, prévisible et peu changeant comme parcours !
A plus court terme, les transports en commun autonomes ou encore la conduite autonome sur longue distance (comme les autoroutes qui sont moins enclins à l’imprévu) sont envisageables.
Pour les transports en commun, c’est même à l’essai. Il y a par exemple une navette autonome d’une dizaine de passagers qui fait tout le tour du campus de la cité scientifique de Villeneuve d’Ascq.
Et vu comment les rageux du volant la double n’importe comment quitte à tuer 2⁄3 étudiants sur la route, m’est avis que son IA doit en avoir déjà vu des vertes et des pas mûres… (oui, le hic est qu’elle roule pour le moment à la vitesse d’un piéton, engendrant une ribambelle de frustrés derrière)
Les bus me paraissent être une étape intéressante car le circuit est prédéfini et peut être facilement supervisé. Tout en bénéficiant des imprévus d’une circulation réelle.
Quant au niveau 3, ils ont effectivement l’effet pervers de nous donner la fausse impression de conduite autonome. C’est ce qui a provoqué la plupart des accidents mortels de Tesla d’ailleurs en dehors du cas où le système n’avait pas “vu” le camion.
Raison pour laquelle ils ont mis une approche similaire au volant de l’homme mort des trains (où le conducteur doit le lâcher et remettre les mains dessus régulièrement il me semble) en obligeant le conducteur à avoir les mains sur le volant quand l’Autopilot est engagé. En cas de refus, le véhicule émet une alarme de plus en plus insistante puis fini par se garer sur le bas côté et bloque la fonction.
Bref, la technologie arrive et commence à être au point… Reste l’upgrade du tas de viande à mettre en oeuvre.
#130
#131
Tu aurais dû lire le lien que tu as mis.
C’est pour le moment un concept avec des prototypes.
C’est fait pour des environnements maîtrisés (ports, centre logistiques, …), donc pas prévu pour la route avec d’autres usagers.
En cherchant un peu plus sur ce truc, j’ai lu que ça circule pour le moment à faible vitesse, ce qui réduit les risques.
Bref, ce n’est pas du niveau 5.
#132
#133
La discussion étant contextualisée sur les véhicules personnels, il ne m’était pas venu à l’esprit de préciser cela.
Car juste après je cite un exemple de transport en commun avec une automatisation de niveau 5. Expérimental, faisant la course avec les escargots et freinant au moindre caillou sur la route (j’exagère), mais bel et bien dépourvu de poste de conduite (il peut se conduire en manuel avec une manette de jeu, c’est marrant à voir sur le coup) et évoluant sur la voie publique.
Le Vera, aussi impressionnant soit-il (et perso j’adore) est plus proche des robots de logistique qu’on trouve en entrepôt, ou encore du robot qui gare les voitures à Lyon St Ex, que d’un camion autonome prévu pour rouler sur la voie publique. Il s’agit plutôt d’une fourmilière orchestrée par une tour de contrôle, roulant à 40km/h max, et assisté de différentes balises (tout ceci est indiqué sur le site de Volvo d’ailleurs) pour évoluer dans un endroit maîtrisé.
Mais ça peut être une étape pour préparer le terrain du camion autonome.
#134
Juste une remarque, c’est 70 miles/h soit environ 110 km/h.
#135
SebGF a écrit :
Après plus de 30 ans de métro autonome, ceux-ci ont toujours un poste de conduite intégré (c’est juste qu’il n’y a pas de cabine dédiée) et sont surveillés durant toute l’exploitation.
Ca me parait étrange, sur la ligne 14 par exemple on se rend bien compte qu’il n’y a aucune supervision humaine.
(portes qui se ferment au terminus alors qu’il reste des gens, portes qui se ferment sur la laisse d’un chien toujours sur le quai, portes qui se ferment alors que les gens sont encore en train de monter sans trainer, non prise en compte des portes de quai condamnées…)
#136
Pour moi le principal problème, c’est que UBER a désactivé le système de freinage d’urgence de Volvo.
Que ce soit une IA ou un conducteur humain au volent, rien ne peut remplacer un bête capteur qui dit :
“ça va taper !!!” ==> Freinage d’urgence
Je pense que ce type d’accident il y en a et en aura encore. C’est pourquoi on a ajouté ces technos de détections. Après UBER a cru que leur système pouvait faire pareil…
#137
“Mais surtout ce rapport met en lumière un des gros problèmes des intelligences artificielles/pilotes automatiques : la faculté d’anticiper et de réagir face à un événement hors scénario.”
C’est pas la faute aux IA ca, mais a Uber… Celle de Google a bien réagi face à la vieille qui chassait un oiseau sur la route. pourtant je suis sur qu’aucun code spécifique n’avait été fait en amont !
#138
Perso je considère que tant qu’il n’y a pas d’infrastructure dédiée pour les véhicules autonomes (et interdits au reste), ben on aura toujours les cas imprévus.
Chute de pierres, sanglier, branches…..
Faire du développement pour essayer de gérer tout ça c’est se prendre encore plus la tête. Dans un environnemen maitrisé, c’est beaucoup plus simple (cf métro automatique).
#139
#140
Laisse tomber, tu refais à chaque fois un nouveau “fil” au lieu de garder celui d’origine, ou je n’ai jamais dit LE CONTRAIRE de
“Oui, le conducteur est responsable de cette connerie. Et non, le fait
que le véhicule ait fait une erreur aussi ne le dédouane absolument pas.”
Amuse-toi à écrire un autre fil sans historique si tu veux, j’ai autre chose à faire.
#141
#142
Mouais enfin… les super cerveaux triés sur le volet par plus de 200 000 ans de sélection, c’est quand-même des machins qui sont capables de te faire chercher pendant 20 minutes ce que t’as fait de tes clés, pour t’apercevoir finalement que tu les as dans ta main gauche depuis le début
–> rien à voir avec le sujet de départ. On parle là d’une tâche bien particulière : reconnaître qu’il y a dans son champ de vision un objet ou être vivant en mouvement. Pas d’appel à la mémoire, aucune variation possible en fonction des capacités de mémorisation, d’organisation générale, de stress, etc. rien à voir avec les capacités intellectuelles non plus.
Il faut savoir différencier fonctionnement du cerveau et fonctions intellectuelles évoluées
#143
#144
Mouais, c’est un peu capillotracté…
Si on s’endort c’est parce qu’on est fatigué et en cas de manque de sommeil important il y a l’option destructrice ou l’option dormir, normal que le cerveau choisisse d’imposer le sommeil. Après le chaos qui consiste à continuer à réaliser un acte dénué de fondement, c’est celui qui permet la créativité.
Quand à la conduite d’une véhicule, le cerveau n’est pas préparé, effectivement, et c’est pour ça qu’on l’instruit en lui donnant : Des leçons de conduite. D’ailleurs comme l’humain a constaté que ces leçons n’étaient pas immédiatement acquises, il a imposé des règles supplémentaires aux nouveaux conducteurs.
Je ne me rappelle plus combien de milliards d’itérations il a fallut à un calculateur avant de pouvoir jouer aux échec ou à starcraft, s’il en faut autant (et le calculateur qui va avec) avant qu’une voiture ne soit autonome, ça va en faire des accidents.
#145
#146
Il me semble qu’il est préconisé sur ce genre de trajet de s’arrêter toutes les 2h pour justement éviter ce type de problème.
Assez bizarrement, depuis que mon véhicule dispose d’un régulateur de vitesse, je fatigue beaucoup moins sur les grands trajets monotones. Il me semble que c’est parce que j’éprouve moins de stress à vérifier régulièrement si je suis à la bonne vitesse.
#147
Autant pour moi c’est bien 70 km/h pour une vitesse limitée à 45 mph ce qui correspond à une départementale à double sens (80 km/h en France).
Voir Arizona
#148
Les voies et quais de métro sont bardées de caméras et détecteurs. Même s’il n’y a pas forcément d’intervention humaine pour les cas que tu cites (le système doit déjà détecter de lui-même les blocages de portes et compagnie), il reste supervisé par un poste de commandement centralisé.
Donc à tout moment, en cas d’incident, des opérateurs humains peuvent intervenir ou déclencher une intervention sur place.
A titre personnel je connais mieux le métro de Lille, mais celui-ci a les mêmes principes vu que c’est le premier métro autonome.
#149
#150
#151
#152
#153
#154
Tu semble associer la flexibilité et la capacité d’apprentissage du cerveau à une supériorité sur la machine. Ca me semble loin d’être évident.
Certes le cerveau reste non égalé en terme de capacité d’adaptation, et l’intuition assure effectivement un comportement ‘pas trop con’ dans une bonne partie des situations.
D’un autre côté, la machine est très largement plus forte sur d’autres points, comme la vitesse de réaction, la prédictibilité du comportement, le mémoire, le capacité à analyser un grand nombre d’options en un temps réduit, à rester d’une attention sans faille pendant des heures…
En terme d’intelligence ‘all-purpose’, l’homme reste supérieur aujourd’hui, mais sur beaucoup de tâches un peu spécialisées sur lesquelles on a vraiment investi, il est battu à plat de couture par la machine. Et ces tâches sont de plus en plus nombreuses, diverses et complexes.
La conduite fait-elle partie de ces tâches où la machine a pris le dessus? Aujourd’hui c’est débattu. je suis persuadé que d’ici une dizaine d’années, il n’y aura plus de débat.
Cette mort choque que celle des 20 (de mémoire) personnes qui meurent chaque jour sur les route françaises, parce qu’elle donne l’impression qu’elle aurait été facilement évitable. La mort des 5-6 personnes dont le conducteur se sont endormi ne le seraient-elle pas aussi ?
Même s’il reste des cas absurdement stupides comme celui-ci (et il en restera, c’est certain), où une voiture autonome tuera un piéton (ou ses passagers) alors qu’elle avait toutes les informations qui auraient permis à un humain de l’éviter, ne serait-il pas criminel d’en retarder le déploiement si la fréquence de ces évènements est 10x inférieure à celle d’une mort par endormissement ou alcool évitée par cette même voiture autonome?
#155